Em um sistema embarcado, sensores, atuadores, microcontroladores e módulos de comunicação precisam trocar dados entre si de maneira organizada e confiável. Essa troca não acontece por acaso: ela ocorre através de protocolos de comunicação, que são conjuntos de regras que definem como os dispositivos falam, quando enviam dados, como detectam erros e quem controla o fluxo da informação. Protocolos bem escolhidos garantem que seus dispositivos cooperem sem conflitos, reduzem o retrabalho de engenharia e aumentam a previsibilidade do projeto. Protocolos, portanto, não são detalhes periféricos são parte central da arquitetura de qualquer projeto embarcado.
Essa troca de dados acontece através de protocolos de comunicação, que nada mais são do que um conjunto de regras que define como os bits devem ser enviados, recebidos e interpretados. É como se cada componente falasse um “idioma” específico e para que tudo se entenda, precisamos escolher o protocolo certo, configurar corretamente e respeitar as limitações físicas do barramento (distância, ruído, velocidade, alimentação e número de dispositivos).
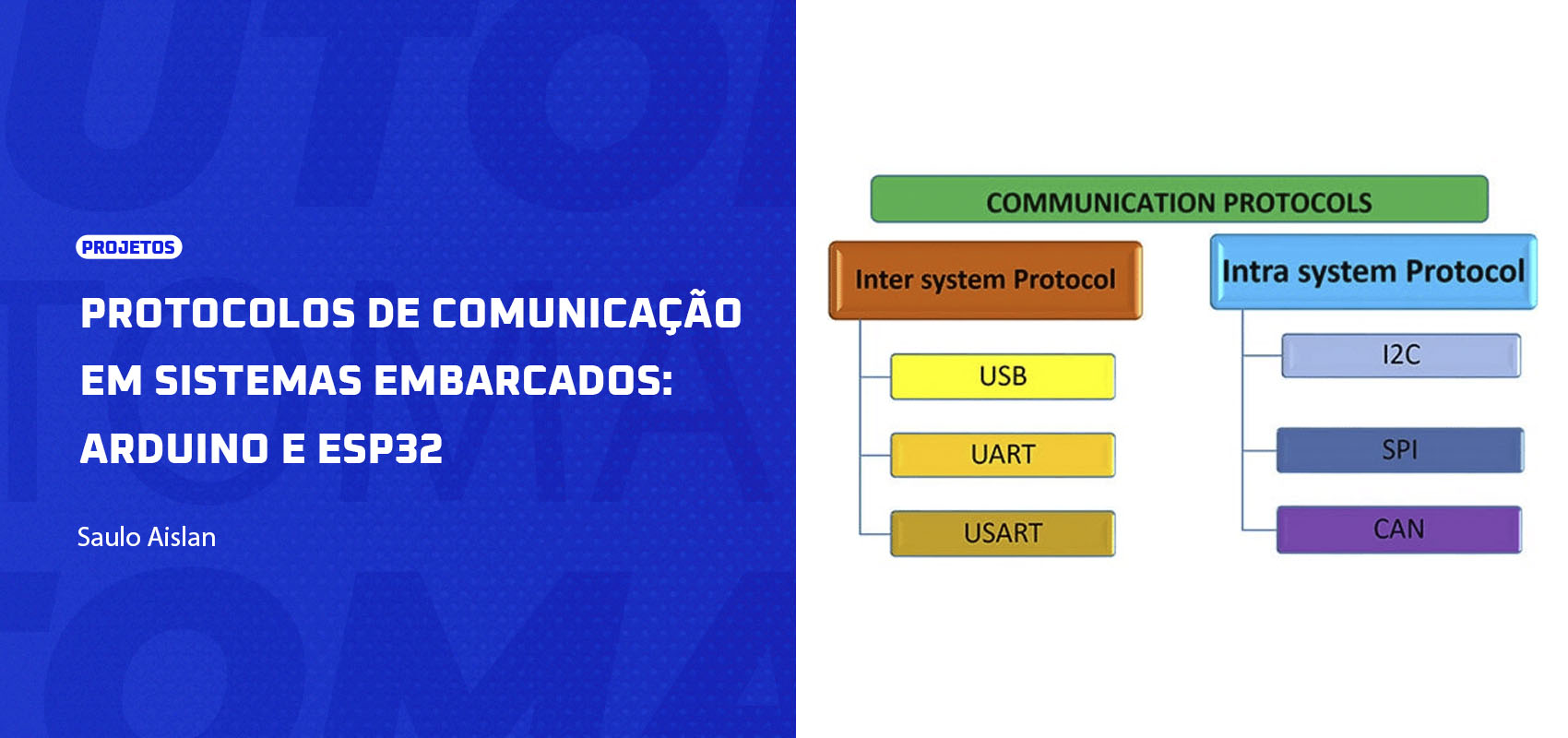
Neste artigo, vamos explorar os protocolos mais usados em sistemas embarcados, como UART, I²C, SPI, 1-Wire, RS-485, CAN, Ethernet e USB, entendendo onde cada um faz mais sentido, quais são seus pontos fortes e fracos e, principalmente, como colocar tudo em prática com bibliotecas e exemplos prontos no GitHub.
Quando dois humanos conversam, combinam língua, ritmo e palavras. Em sistemas embarcados é a mesma ideia: microcontroladores, sensores, displays e módulos usam protocolos, ou seja, um conjunto de regras para trocar dados de forma previsível. Entender esses protocolos é essencial para projetar sistemas confiáveis, evitar perda de dados e escolher o hardware certo para cada tarefa.
Protocolos de comunicação são como “idiomas” que dispositivos usam para trocar informações, definindo regras como:
Essas regras estruturam a comunicação para que dispositivos diferentes possam cooperar sem ambiguidade ou falhas de interpretação, o que é essencial em sistemas complexos como automação industrial, veículos, redes de sensores e aplicações IoT
Antes de entrar nos protocolos por nome, é útil entender as características que determinam onde e quando cada protocolo se adequa melhor:
Esses fatores influenciam diretamente o desempenho, custo, consumo de energia e complexidade do projeto.
Na prática, sistemas embarcados raramente usam um único tipo de comunicação. Um projeto pode ter I²C para sensores, SPI para memória ou display, UART para debug, e até CAN ou RS-485 quando precisa de robustez em ambientes industriais. Por isso, conhecer o papel de cada protocolo ajuda a escolher melhor o hardware e evitar gargalos ou falhas de comunicação.
A seguir estão os protocolos mais comuns e importantes no dia a dia do desenvolvimento embarcado.

Exemplo de UART
UART significa Universal Asynchronous Receiver/Transmitter. Ele é um dos protocolos mais populares em sistemas embarcados porque é extremamente simples de implementar e existe em praticamente todo microcontrolador.
A UART é uma comunicação serial assíncrona, ou seja: não existe um sinal de clock compartilhado. Em vez disso, os dois lados precisam concordar previamente com parâmetros como:
Normalmente, a UART utiliza dois pinos principais:
Ela é muito comum para log de depuração, comunicação com PC via conversor USB-Serial, integração com módulos como GPS (Veja esse artigo sobre: GPS Neo-6M com Arduino), alguns módulos GSM, e até comunicação entre dois microcontroladores quando o projeto é pequeno.
Prós (vantagens):
Contras (desvantagens):
Exemplos do GitHub e Artigos:
Repositório com exemplos de UART para Arduino e ESP32:
https://github.com/arduino/ArduinoCore-avr/blob/master/libraries/SoftwareSerial/src/SoftwareSerial.h

Exemplo de SPI
SPI significa Serial Peripheral Interface. Ele é um protocolo serial síncrono com clock, muito conhecido por sua alta velocidade e pela forma simples de transferir dados com baixa sobrecarga.
O SPI geralmente trabalha com:
Os pinos típicos são:
O diferencial do SPI é que ele costuma ser full-duplex, ou seja: enquanto o master envia dados no MOSI, ele pode receber dados ao mesmo tempo no MISO. Isso torna o SPI excelente para aplicações que exigem desempenho.
SPI é muito comum em:
O ponto de atenção é que cada slave normalmente precisa de um CS exclusivo, o que aumenta o consumo de pinos quando o sistema cresce.
Prós (vantagens):
Contras (desvantagens):
Exemplos do GitHub e Artigos:
Arduino SPI com múltiplos dispositivos:
https://github.com/espressif/arduino-esp32/tree/master/libraries/SPI/examples/SPI_Multiple_Buses

Exemplo de I2C
I²C significa Inter-Integrated Circuit. Ele foi criado pela Philips e se tornou um dos protocolos mais comuns em sistemas embarcados por ser extremamente eficiente em termos de pinos: ele usa apenas dois fios para conectar vários dispositivos.
O I²C é popular devido à sua estrutura Multi-Master (Controller) e Multi-Slave (Target), também conhecida como I²C Bus. Isso é muito útil quando você precisa registrar dados de vários sensores e periféricos, usando um barramento compartilhado, sem gastar muitos pinos do microcontrolador.
Ele aparece com muita frequência em circuitos com:
O protocolo I²C normalmente funciona em modo Half-Duplex, ou seja: os dados trafegam nos dois sentidos, mas não ao mesmo tempo como no full duplex. Isso influencia a taxa efetiva de transmissão e deve ser considerado em aplicações com alto volume de dados.
Assim como SPI e UART, o I²C é um protocolo serial, mas com uma grande diferença: ele permite comunicação com vários dispositivos usando apenas duas linhas (fios):
A comunicação acontece de forma síncrona, com o clock distribuído pelo master para os slaves. Apesar de ser muito atrativo pela simplicidade de cabos e quantidade de pinos, o I²C pode ficar mais “sensível” em ambientes com ruído, cabos longos ou muitos dispositivos no barramento, exigindo mais cuidado na integração.
Prós (vantagens):
Contras (desvantagens):
Exemplos do GitHub e Artigos:
Scanner e comunicação I²C no Arduino e STM32:
https://github.com/stm32duino/Arduino_Core_STM32/tree/main/libraries/Wire/examples

Exemplo de 1-Wire
O One-Wire é um protocolo que, como o nome diz, pode funcionar com apenas um fio de dados (além do GND). Ele ficou extremamente popular em aplicações com sensores como o DS18B20 (temperatura), onde não é necessário grande volume de dados.
O 1-Wire costuma ter:
Ele é uma solução bem interessante quando você quer:
Prós:
Contras:
Exemplos do GitHub e Artigos:
Comunicação 1-Wire ESP32:
https://github.com/PaulStoffregen/OneWire

Exemplo de RS-485
O RS-485 é um padrão físico de comunicação serial diferencial muito usado na indústria. Ele é extremamente popular porque permite:
Muitas vezes, RS-485 aparece junto com o Modbus RTU, que é um protocolo de camada superior (aplicação) muito usado em automação e PLCs. Nesse cenário, o RS-485 “carrega” as mensagens Modbus.
Ele é muito comum em:
Prós (vantagens):
Contras (desvantagens):
Exemplos do GitHub e Artigos:
ESP32 RS-485 Modbus:
https://github.com/espressif/esp-modbus

Exemplo de CAM
CAN significa Controller Area Network. É um protocolo criado para ser extremamente confiável em ambientes com ruído elétrico e muitos nós na rede, sendo amplamente usado em:
A grande força do CAN é que ele foi feito para redes onde vários dispositivos compartilham o mesmo barramento, e mesmo assim a comunicação continua organizada graças a mecanismos como:
Isso faz com que o CAN seja uma escolha excelente quando o ambiente não é “bonitinho” como bancada de laboratório, mas sim um cenário real com motores, inversores, ruídos e distâncias maiores.
Prós (vantagens):
Contras (desvantagens):
Exemplo GitHub:
MCP2515 CAN interface para Arduino:
https://github.com/coryjfowler/MCP_CAN_lib
A Ethernet é a escolha ideal quando o sistema embarcado precisa:
Ela é muito usada em:
Por ser uma tecnologia de rede completa, ela também exige mais processamento e uma pilha de software (TCP/IP), mas entrega alta performance e integração fácil com o mundo.
Prós (vantagens):
Contras (desvantagens):
Exemplos do GitHub e Artigos:
lwIP (lightweight IP stack) e Ethernet:
https://github.com/espressif/arduino-esp32/tree/master/libraries/Ethernet
https://github.com/espressif/esp-lwip
O USB é muito comum em produtos comerciais e projetos que precisam se conectar diretamente ao computador, pois, além de dados, ele também pode fornecer energia.
Ele aparece em:
Apesar de ser extremamente comum, USB pode ser mais “chato” de implementar corretamente, porque envolve conceitos como host/device, enumeração e classes USB. Os pinos típicos são: D+, D- e dependendo do padrão: VBUS (5V) e GND
Prós (vantagens):
Contras (desvantagens):
Exemplos do GitHub e Artigos:
Arduino USB Host Shield libraries:
https://github.com/felis/USB_Host_Shield_2.0
Protocolos de comunicação são fundamentais para qualquer sistema embarcado que envolva intercâmbio de dados entre dispositivos. Escolher o protocolo errado pode causar gargalos de desempenho, falhas de interoperabilidade ou necessidades de retrabalho. Influências como velocidade, número de nós, custo de hardware e complexidade de implementação determinam qual protocolo é mais adequado para cada caso.
Com as referências e exemplos práticos citados acima, você tem uma base sólida para começar a testar e implementar UART, I²C, 1-Wire, SPI, CAN, Ethernet e USB em projetos reais, acelerando o desenvolvimento e reduzindo os riscos técnicos.
Para mais artigos como esse, continue acompanhando as postagens semanais do blog e não deixe de visitar nossa loja. Lá você encontra todos os componentes necessários para desenvolver esse e muitos outros projetos!
Que a força esteja com vocês!
Até mais!
Algumas referências utilizadas no artigo:
|
A Eletrogate é uma loja virtual de componentes eletrônicos do Brasil e possui diversos produtos relacionados à Arduino, Automação, Robótica e Eletrônica em geral.
Tenha a Metodologia Eletrogate dentro da sua Escola! Conheça nosso Programa de Robótica nas Escolas!

Rua Rio de Janeiro, 441
Centro - Belo Horizonte/MG
CEP 30160-041
*Não temos atendimento físico
Eletrogate Componentes Eletrônicos
CNPJ: 18.917.521/0001-73