

Você sabia que é possível construir um drone de baixo custo e usar o nosso querido Arduino como controladora de vôo? Não? Então vem com a gente que vamos te ensinar o passo a passo de como montar o seu, mas antes, alguns recados importantes:
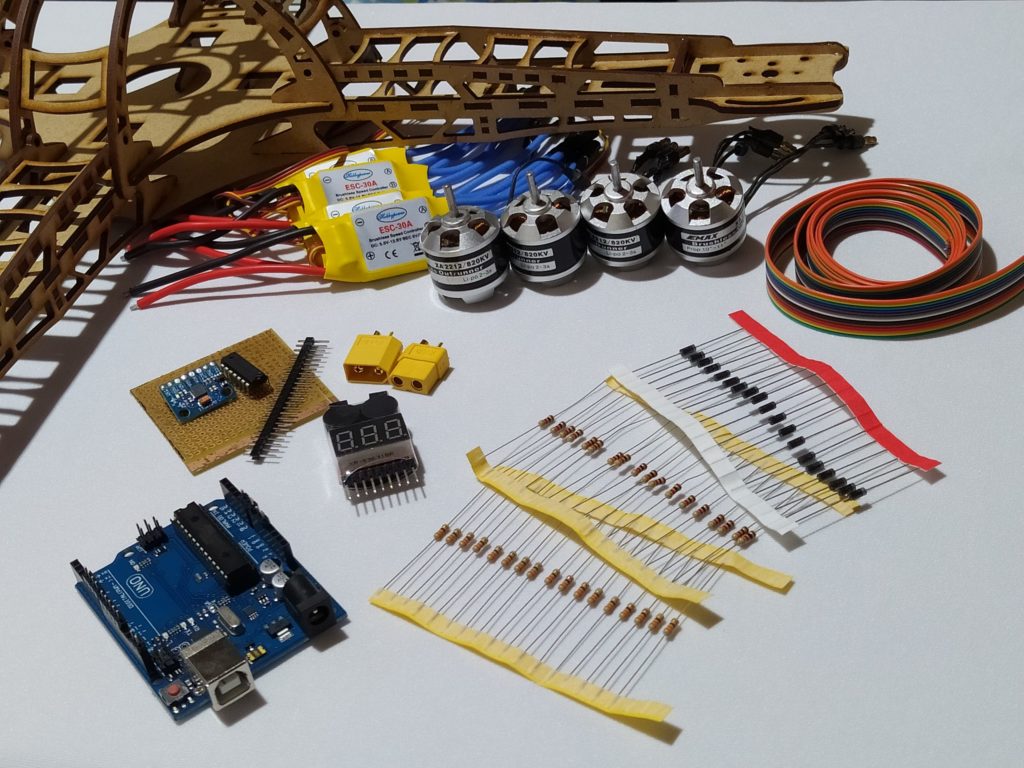

Vamos conhecer as peças que compõem o nosso kit: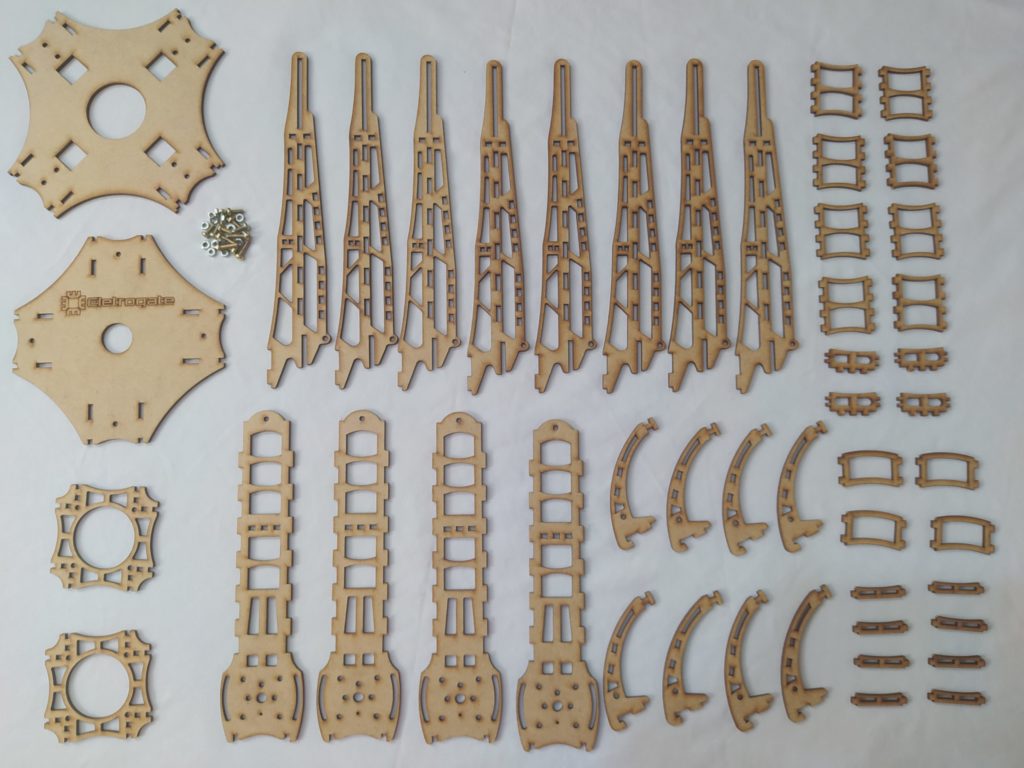 O kit é composto por 48 recortes em MDF e 16 parafusos de diversos tamanhos com porcas M3. Veja mais detalhes sobre algumas delas nas próximas imagens.
O kit é composto por 48 recortes em MDF e 16 parafusos de diversos tamanhos com porcas M3. Veja mais detalhes sobre algumas delas nas próximas imagens.
 Cada um dos 4 braços é formado por 8 peças iguais a essas, sendo duas laterais, uma central e 5 cavernas ou nervuras. O processo de montagem é bem simples, basta encaixar uma das laterais na parte central, posicionar as nervuras como na imagem abaixo e terminar fechando com a outra lateral. você deve repetir o processo para os outros 3 braços restantes.
Cada um dos 4 braços é formado por 8 peças iguais a essas, sendo duas laterais, uma central e 5 cavernas ou nervuras. O processo de montagem é bem simples, basta encaixar uma das laterais na parte central, posicionar as nervuras como na imagem abaixo e terminar fechando com a outra lateral. você deve repetir o processo para os outros 3 braços restantes.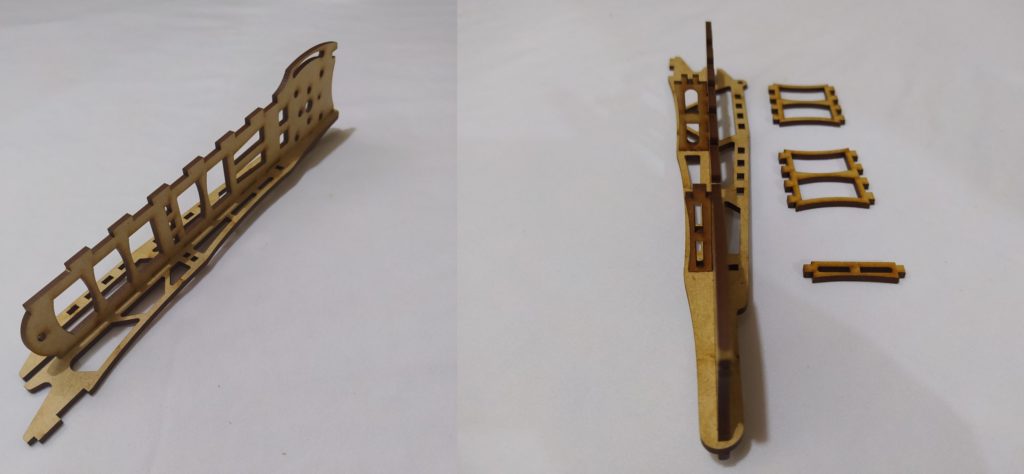
 Sua montagem também é muito simples, basta unir as três peças abaixo com o plate superior e repetir o processo com as demais.
Sua montagem também é muito simples, basta unir as três peças abaixo com o plate superior e repetir o processo com as demais. Ao final, sua peça deverá ser idêntica à primeira figura. Logo após, pegue as duas novas peças mostradas e posicione-as no topo da peça montada anteriormente, deixando - a como na segunda figura.
Ao final, sua peça deverá ser idêntica à primeira figura. Logo após, pegue as duas novas peças mostradas e posicione-as no topo da peça montada anteriormente, deixando - a como na segunda figura. Feito isso, reforce todos os pontos de conexão utilizando cola instantânea C.A, para garantir que nada se solte durante o vôo. Faça esse procedimento para os pontos de encaixe do plate superior e braços.
Feito isso, reforce todos os pontos de conexão utilizando cola instantânea C.A, para garantir que nada se solte durante o vôo. Faça esse procedimento para os pontos de encaixe do plate superior e braços. Nesse ponto, terminamos de montar os componentes principais do frame. Vamos preparar agora os ESCs e motores para a fixação nos braços e, posteriormente, montarmos o drone por definitivo. Para isso, precisamos soldar os conectores bullet tanto nos ESCs como nos motores, sendo os conectores macho nos três terminais do motor e os fêmea, nos três terminais de cada ESC. Veja na imagem abaixo:
Nesse ponto, terminamos de montar os componentes principais do frame. Vamos preparar agora os ESCs e motores para a fixação nos braços e, posteriormente, montarmos o drone por definitivo. Para isso, precisamos soldar os conectores bullet tanto nos ESCs como nos motores, sendo os conectores macho nos três terminais do motor e os fêmea, nos três terminais de cada ESC. Veja na imagem abaixo: Feito isso, isole os conectores de ambos, como mostrado na figura abaixo:
Feito isso, isole os conectores de ambos, como mostrado na figura abaixo: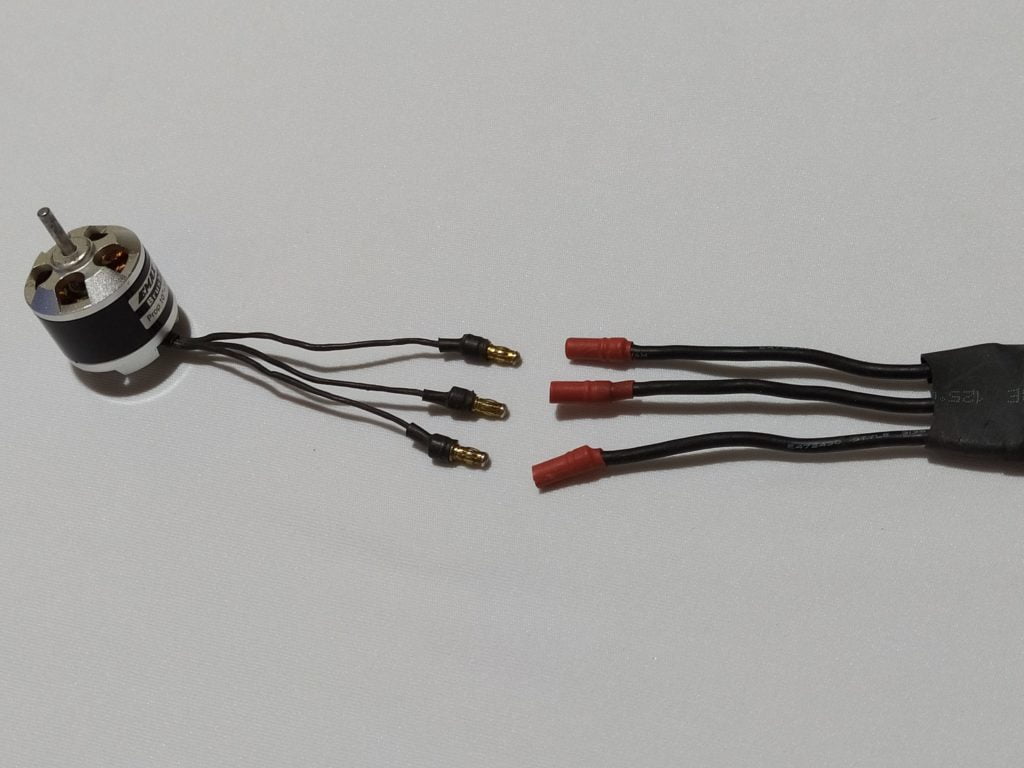 O próximo passo é a fixação dos ESCs nos braços. Eles não precisam de cola, o próprio compartimento já os deixam firmes. Basta acomodá-los conforme a imagem:
O próximo passo é a fixação dos ESCs nos braços. Eles não precisam de cola, o próprio compartimento já os deixam firmes. Basta acomodá-los conforme a imagem: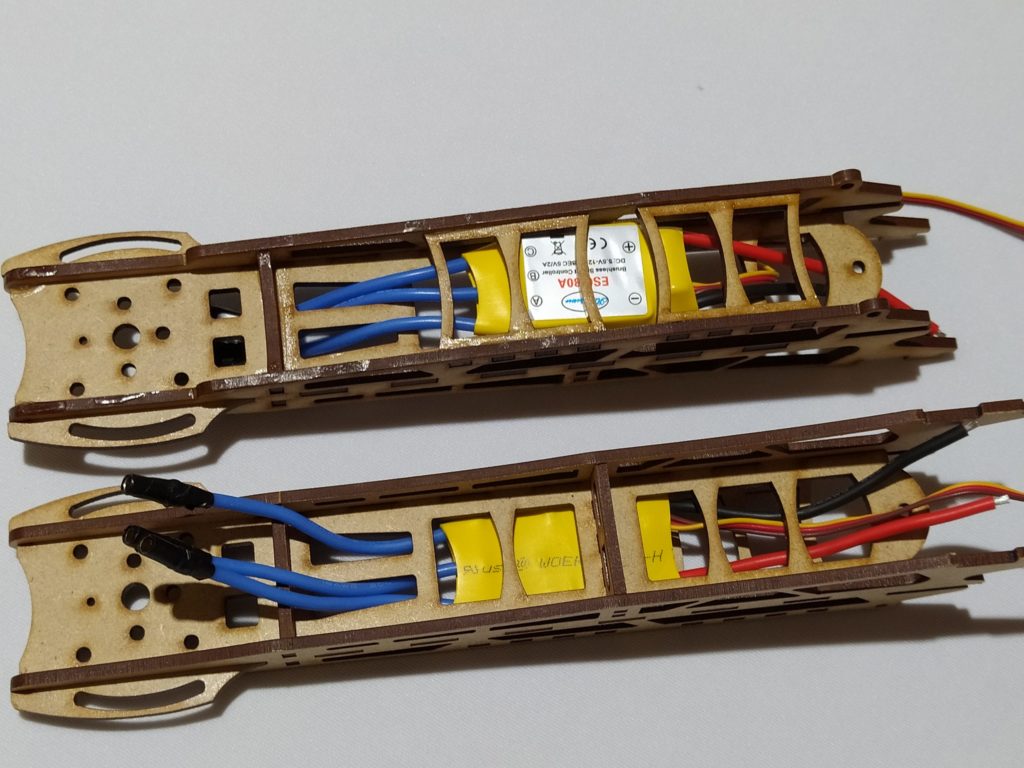 Feito isso, vamos fixar os motores nos braços. Para isso, você usará os parafusos que vieram com seus motores, posicionando-os, conforme mostrado abaixo:
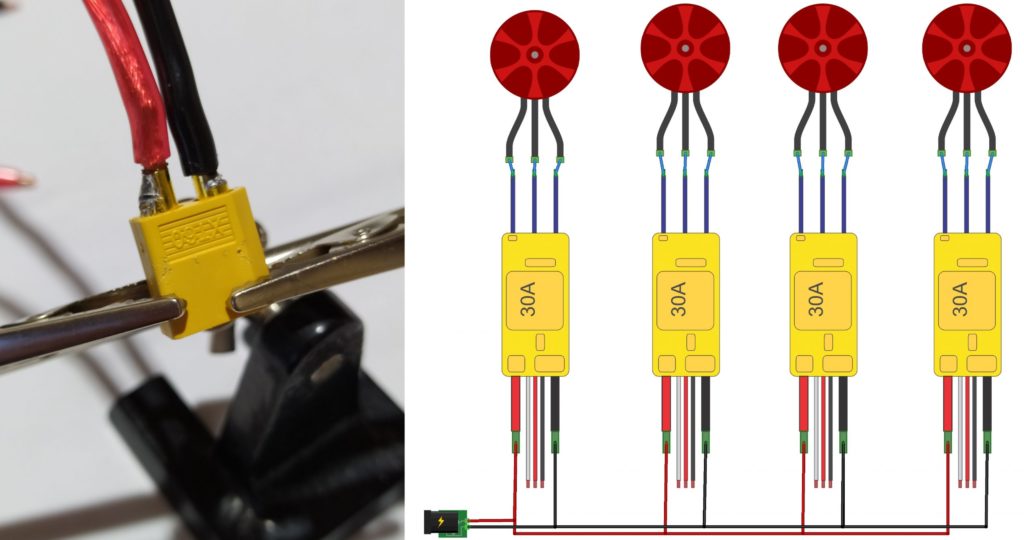
Feito isso, vamos fixar os motores nos braços. Para isso, você usará os parafusos que vieram com seus motores, posicionando-os, conforme mostrado abaixo: Vamos agora preparar as conexões de energia da nossa máquina voadora. Para isso, você deverá encaixar os braços no plate superior, soldar o conector XT60 em uma das pontas do par de cabos 10AWG conforme ilustrado e, em paralelo, ligar os ESCs a ele, segundo o esquemático a seguir:
Vamos agora preparar as conexões de energia da nossa máquina voadora. Para isso, você deverá encaixar os braços no plate superior, soldar o conector XT60 em uma das pontas do par de cabos 10AWG conforme ilustrado e, em paralelo, ligar os ESCs a ele, segundo o esquemático a seguir:
 O resultado deverá ser parecido com o mostrado na foto abaixo. Lembre-se de isolar todos os pontos e caprichar na solda, pois toda a corrente necessária para o funcionamento dos motores passará por aqui!
O resultado deverá ser parecido com o mostrado na foto abaixo. Lembre-se de isolar todos os pontos e caprichar na solda, pois toda a corrente necessária para o funcionamento dos motores passará por aqui!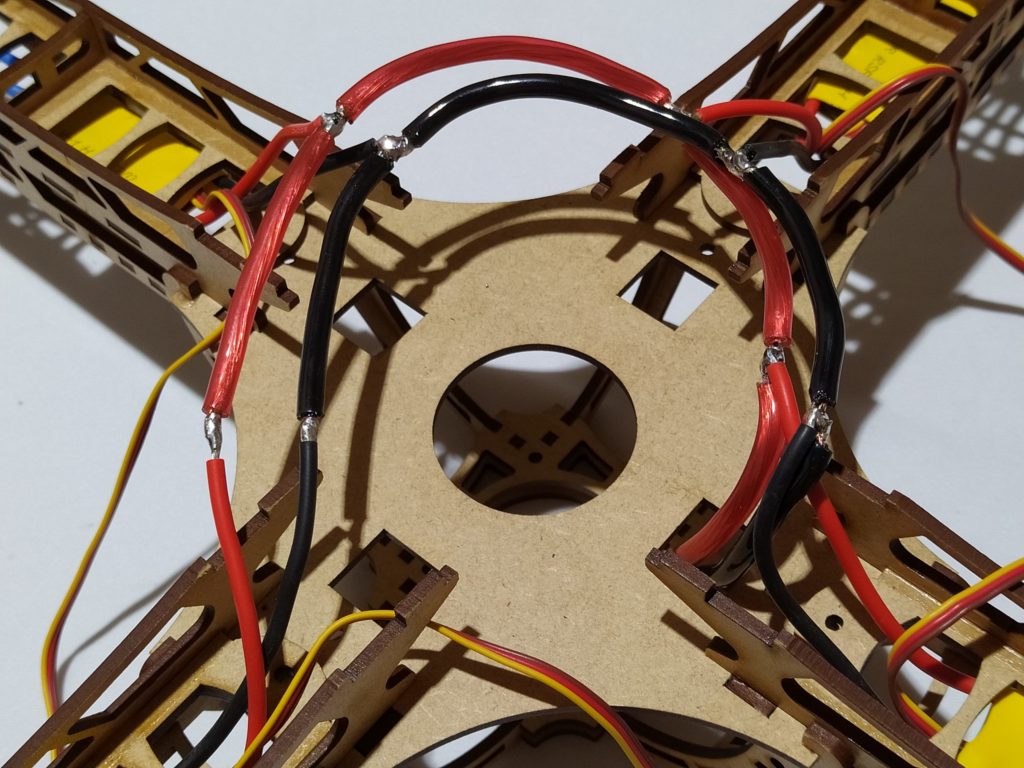 Dica: Você também pode substituir os cabos 10AWG por uma placa de distribuição, como mostrada na figura a seguir:
Dica: Você também pode substituir os cabos 10AWG por uma placa de distribuição, como mostrada na figura a seguir: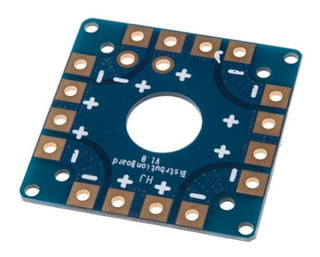 Ela te proporcionará uma maior organização do cabeamento, porém pode elevar o custo final da montagem.
Ela te proporcionará uma maior organização do cabeamento, porém pode elevar o custo final da montagem.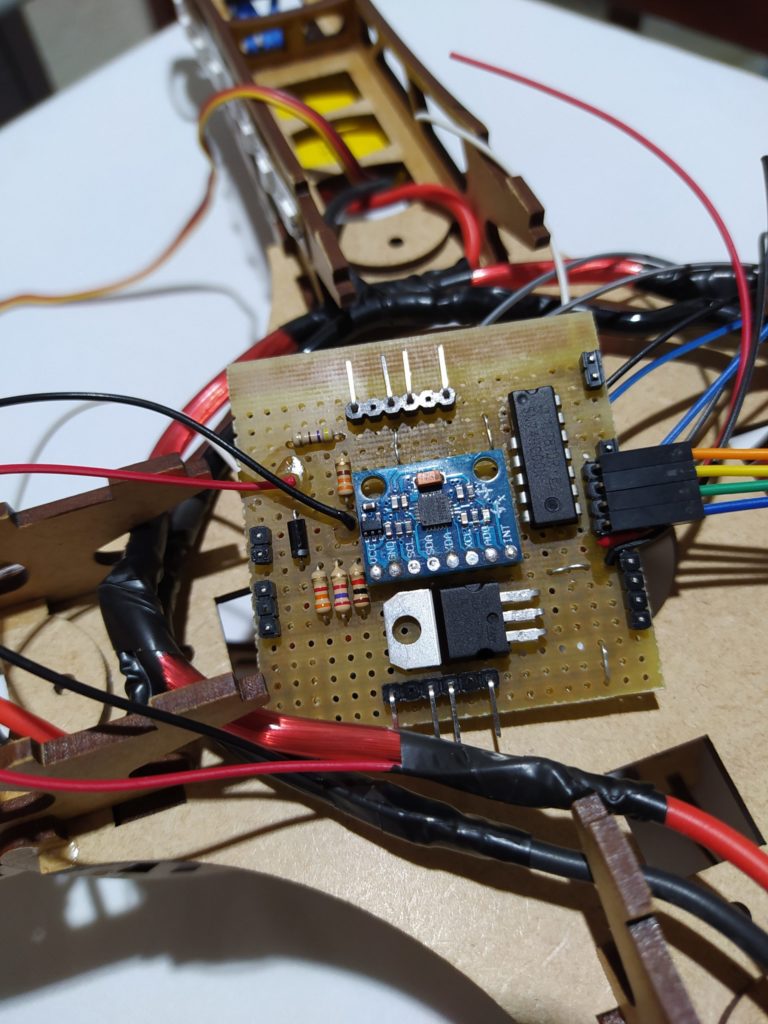 Para isso, vamos seguir as conexões representadas no diagrama abaixo:
Para isso, vamos seguir as conexões representadas no diagrama abaixo: Antes da montagem, vamos conhecer um pouco dos circuitos que compõem a nossa controladora:Estabilização/Nivelamento: É composto unicamente pela MPU6050. Sua tarefa é identificar a inclinação da aeronave e fazer com que ela retorne ao seu vôo estabilizado quando o piloto voltar o stick do rádio para a posição neutra.Sensor de Bateria: é composto pelo divisor de tensão contendo os resistores de 1KΩ e 1,5KΩ. São eles quem informam o nível de tensão ao Arduino e, por estarem conectados em uma entrada analógica, o microcontrolador consegue acompanhar todas as alterações de tensão decorrentes do descarregamento da bateria. Ao se aproximar de um valor X definido em software, o sistema envia um sinal pulsante ao pino D12, que por sua vez está responsável pelo sistema de iluminação/sinalização.Sistema de iluminação/sinalização: é composto pelo divisor de tensão contendo os resistores de 470Ω e 330Ω, o CI 74HC00, o transistor TIP120 e pelas fitas de led. Para entender seu funcionamento, precisamos revisar o funcionamento do 74HC00, que é um CI contendo 4 portas lógicas na configuração NAND.
Uma porta NAND é simplesmente uma porta E (AND) com uma porta NOT em sua saída. O funcionamento da porta E é bem simples: para que a saída seja verdadeira, ambas as entradas precisam ser verdadeiras, ou seja, ambas precisam estar em nível lógico alto. Mas como temos um inversor na saída, sempre que as duas entradas forem verdadeiras a saída será falsa, conforme pode ser visto na tabela verdade abaixo:
Antes da montagem, vamos conhecer um pouco dos circuitos que compõem a nossa controladora:Estabilização/Nivelamento: É composto unicamente pela MPU6050. Sua tarefa é identificar a inclinação da aeronave e fazer com que ela retorne ao seu vôo estabilizado quando o piloto voltar o stick do rádio para a posição neutra.Sensor de Bateria: é composto pelo divisor de tensão contendo os resistores de 1KΩ e 1,5KΩ. São eles quem informam o nível de tensão ao Arduino e, por estarem conectados em uma entrada analógica, o microcontrolador consegue acompanhar todas as alterações de tensão decorrentes do descarregamento da bateria. Ao se aproximar de um valor X definido em software, o sistema envia um sinal pulsante ao pino D12, que por sua vez está responsável pelo sistema de iluminação/sinalização.Sistema de iluminação/sinalização: é composto pelo divisor de tensão contendo os resistores de 470Ω e 330Ω, o CI 74HC00, o transistor TIP120 e pelas fitas de led. Para entender seu funcionamento, precisamos revisar o funcionamento do 74HC00, que é um CI contendo 4 portas lógicas na configuração NAND.
Uma porta NAND é simplesmente uma porta E (AND) com uma porta NOT em sua saída. O funcionamento da porta E é bem simples: para que a saída seja verdadeira, ambas as entradas precisam ser verdadeiras, ou seja, ambas precisam estar em nível lógico alto. Mas como temos um inversor na saída, sempre que as duas entradas forem verdadeiras a saída será falsa, conforme pode ser visto na tabela verdade abaixo: Em nosso drone, sua função será piscar a fita de LED para indicar os processos de calibração da MPU6050 sempre que o drone for energizado e também alertar quando a bateria estiver fraca.
Para entender seu funcionamento, vamos considerar a entrada A contendo 5V fixos e a entrada B estando conectada ao pino D12 do Arduino, já mencionado. Quando a bateria estiver carregada, o divisor de tensão enviará 5V ao pino A0 e este, por sua vez, manterá o pino D12 em nível lógico baixo, o que faz a saída D se manter em nível lógico alto. Isso satura o transistor, que por sua vez, atua como chave e aciona a fita de LED. Quando o pino A0 receber um nível de tensão X, ele acionará o pino D12, fazendo com que a entrada B receba 5V. Como a entrada A recebe 5V permanentemente, ambas as entradas se tornam verdadeiras e a saída D vai à 0, fazendo o transistor entrar em corte, desligando os LEDs. Essa lógica faz com que o Arduino se comunique conosco através do sistema de iluminação, fazendo os LEDs piscarem indicando as condições da bateria e da MPU6050. Legal, né?Entrada e saída de sinais: O circuito de entrada é composto unicamente pelo receptor, que recebe os comandos do piloto e transmite ao Arduino. Este, por sua vez, interpreta e envia aos ESCs (circuito de saída) para transmitir aos motores as instruções do piloto.Dica: Para entender melhor o funcionamento de cada parte do drone e até mesmo sobre alguns componentes em específico, sugerimos que faça a leitura dos posts abaixo antes de iniciar sua montagem:
Dito isso, vamos começar a nossa montagem!!!Nossa controladora será uma espécie de Shield para o Arduino, logo o primeiro passo é cortar a placa padrão no tamanho do arduino e posicionar os pinos 180º nos lugares referentes aos pinos do Arduino que serão usados. A nossa ficou assim:
Em nosso drone, sua função será piscar a fita de LED para indicar os processos de calibração da MPU6050 sempre que o drone for energizado e também alertar quando a bateria estiver fraca.
Para entender seu funcionamento, vamos considerar a entrada A contendo 5V fixos e a entrada B estando conectada ao pino D12 do Arduino, já mencionado. Quando a bateria estiver carregada, o divisor de tensão enviará 5V ao pino A0 e este, por sua vez, manterá o pino D12 em nível lógico baixo, o que faz a saída D se manter em nível lógico alto. Isso satura o transistor, que por sua vez, atua como chave e aciona a fita de LED. Quando o pino A0 receber um nível de tensão X, ele acionará o pino D12, fazendo com que a entrada B receba 5V. Como a entrada A recebe 5V permanentemente, ambas as entradas se tornam verdadeiras e a saída D vai à 0, fazendo o transistor entrar em corte, desligando os LEDs. Essa lógica faz com que o Arduino se comunique conosco através do sistema de iluminação, fazendo os LEDs piscarem indicando as condições da bateria e da MPU6050. Legal, né?Entrada e saída de sinais: O circuito de entrada é composto unicamente pelo receptor, que recebe os comandos do piloto e transmite ao Arduino. Este, por sua vez, interpreta e envia aos ESCs (circuito de saída) para transmitir aos motores as instruções do piloto.Dica: Para entender melhor o funcionamento de cada parte do drone e até mesmo sobre alguns componentes em específico, sugerimos que faça a leitura dos posts abaixo antes de iniciar sua montagem:
Dito isso, vamos começar a nossa montagem!!!Nossa controladora será uma espécie de Shield para o Arduino, logo o primeiro passo é cortar a placa padrão no tamanho do arduino e posicionar os pinos 180º nos lugares referentes aos pinos do Arduino que serão usados. A nossa ficou assim: O próximo passo é garantir que o pino de 5V dos ESCs não seja conectado em hipótese alguma ao nosso Arduino. Para isso, fizemos um conector usando a barra de pinos 90º que nos permite apenas a conexão do GND e do sinal na nossa controladora. Veja só:
O próximo passo é garantir que o pino de 5V dos ESCs não seja conectado em hipótese alguma ao nosso Arduino. Para isso, fizemos um conector usando a barra de pinos 90º que nos permite apenas a conexão do GND e do sinal na nossa controladora. Veja só: Feito isso, vamos organizar os demais componentes de forma harmônica em nossa placa, conforme apresentado na imagem a seguir:
Feito isso, vamos organizar os demais componentes de forma harmônica em nossa placa, conforme apresentado na imagem a seguir: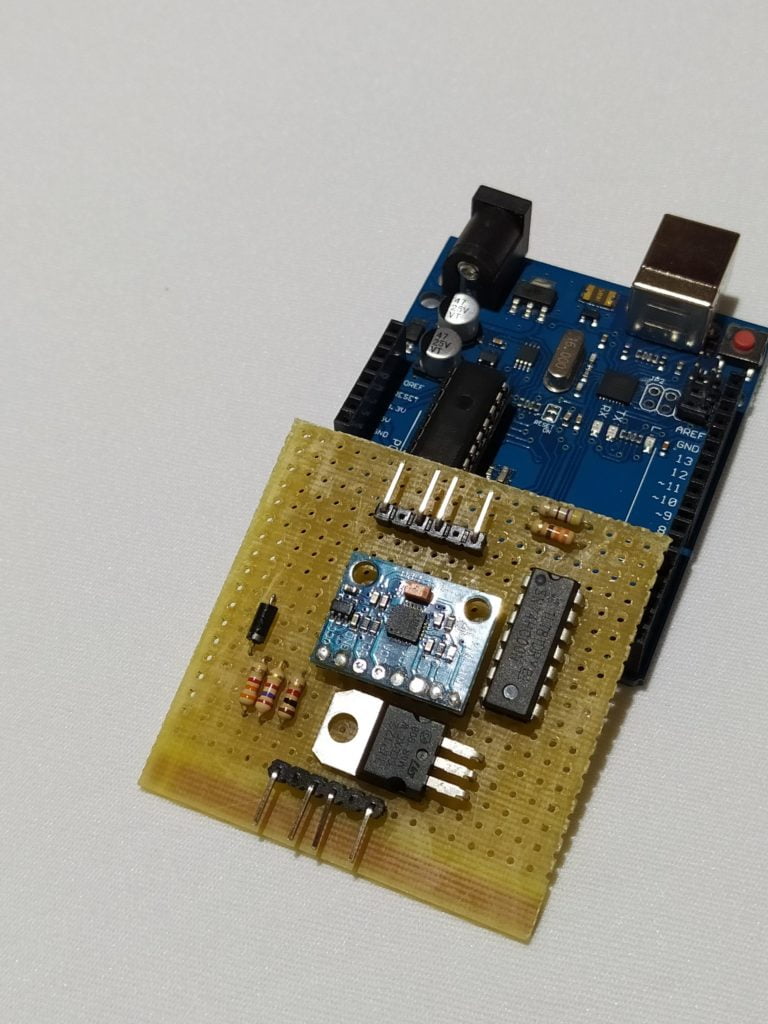 Atente-se a dois detalhes importantes:
1- A MPU6050 deve ser conectada o mais centralizado possível para garantir que o centro de massa do drone não fique deslocado, ocasionando tendências. Ela também deve ser conectada da mesma forma como mostramos na imagem abaixo, pois é ela quem irá definir qual a frente da nossa máquina.
2- Utilizamos dois resistores de 3,3KΩ e 2,7KΩ em paralelo para o sensor de bateria pois não tínhamos um resistor de 1,5KΩ disponível no momento da montagem. Você pode utilizar essa associação de resistores caso esse também for o seu caso.Feito isso, partiremos para a solda das conexões. Você pode usar os próprios pads da placa para fazer as trilhas, o que deixa tudo bem mais organizado. Por se tratar de uma placa pequena e possuir muitos componentes, preste muita atenção ao confeccionar as conexões, sempre testando com o multímetro para garantir que não haja nenhuma ligação errada ou curtos circuitos. Ao final, essa foi a aparência da parte traseira da controladora:
Atente-se a dois detalhes importantes:
1- A MPU6050 deve ser conectada o mais centralizado possível para garantir que o centro de massa do drone não fique deslocado, ocasionando tendências. Ela também deve ser conectada da mesma forma como mostramos na imagem abaixo, pois é ela quem irá definir qual a frente da nossa máquina.
2- Utilizamos dois resistores de 3,3KΩ e 2,7KΩ em paralelo para o sensor de bateria pois não tínhamos um resistor de 1,5KΩ disponível no momento da montagem. Você pode utilizar essa associação de resistores caso esse também for o seu caso.Feito isso, partiremos para a solda das conexões. Você pode usar os próprios pads da placa para fazer as trilhas, o que deixa tudo bem mais organizado. Por se tratar de uma placa pequena e possuir muitos componentes, preste muita atenção ao confeccionar as conexões, sempre testando com o multímetro para garantir que não haja nenhuma ligação errada ou curtos circuitos. Ao final, essa foi a aparência da parte traseira da controladora: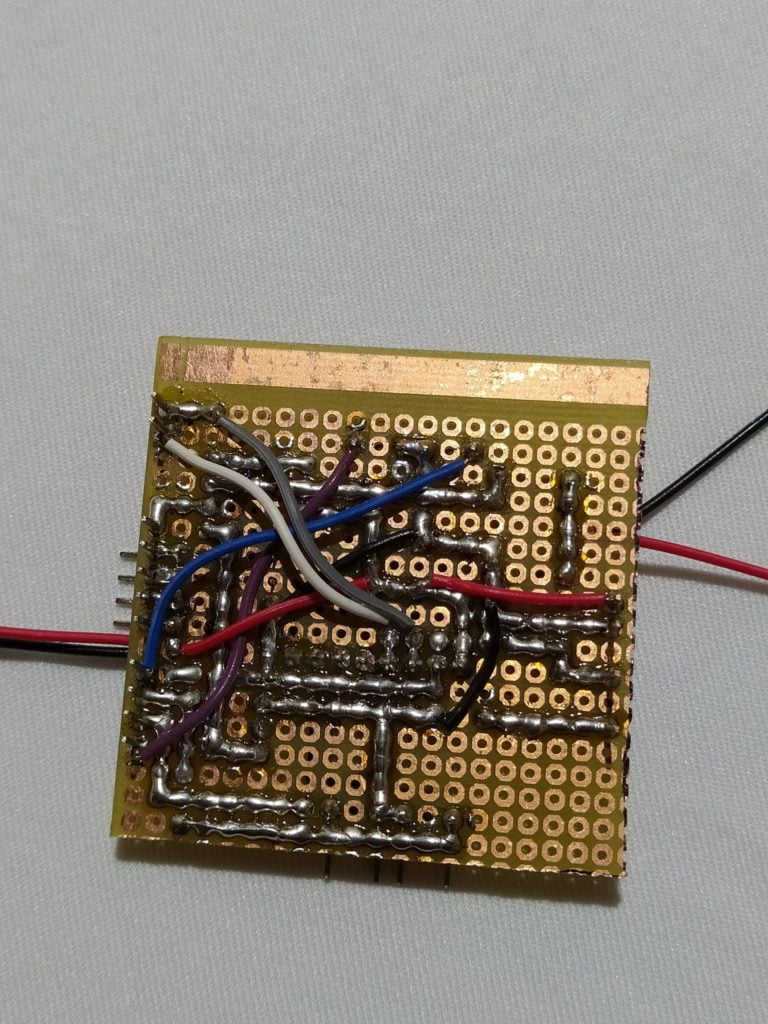 Após isso, vamos colar as fitas de led em um dos lados do braço e soldar na saída do transistor, combinando as cores de acordo com a sua preferência. O importante é ter duas cores distintas, uma que identifique a frente e outra, a parte de trás do drone. O +12V da fita deve ser conectado junto ao postivo dos ESCs e o negativo ao transistor, conforme mostrado no diagrama do projeto.
Após isso, vamos colar as fitas de led em um dos lados do braço e soldar na saída do transistor, combinando as cores de acordo com a sua preferência. O importante é ter duas cores distintas, uma que identifique a frente e outra, a parte de trás do drone. O +12V da fita deve ser conectado junto ao postivo dos ESCs e o negativo ao transistor, conforme mostrado no diagrama do projeto.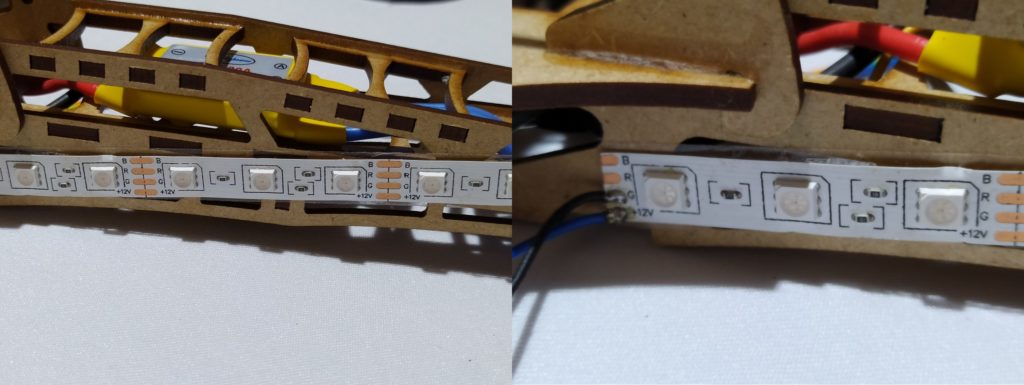 Para o nosso, escolhemos as cores vermelho para identificar a frente, e verde para identificar a parte de trás. Segundo nossos testes, foram as cores mais visíveis mesmo durante o dia.
Para o nosso, escolhemos as cores vermelho para identificar a frente, e verde para identificar a parte de trás. Segundo nossos testes, foram as cores mais visíveis mesmo durante o dia. Terminado a iluminação, precisamos organizar os fios e fixar o Arduino com a Shield já conectada. Para isso, vamos usar alguns pedaços de fita dupla face VHB, que além de nos proporcionar uma excelente fixação, também auxilia na absorção das vibrações, o que é excelente para a MPU6050 trabalhar corretamente.
Terminado a iluminação, precisamos organizar os fios e fixar o Arduino com a Shield já conectada. Para isso, vamos usar alguns pedaços de fita dupla face VHB, que além de nos proporcionar uma excelente fixação, também auxilia na absorção das vibrações, o que é excelente para a MPU6050 trabalhar corretamente.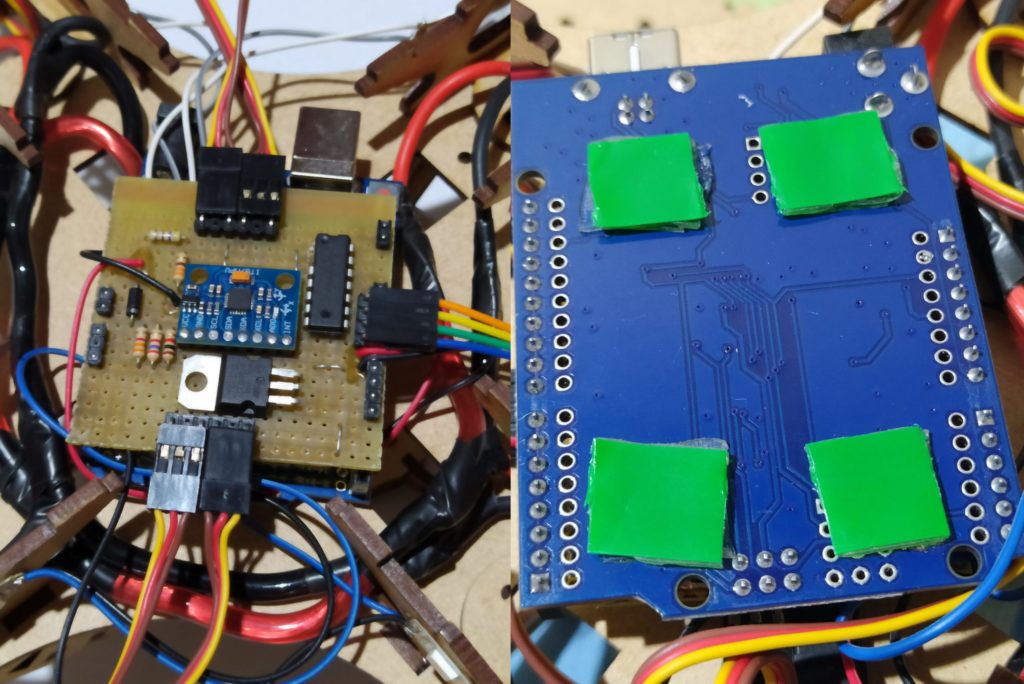 Fixe o Arduino no plate inferior o mais centralizado possível, encaixe o plate nos braços e parafuse-os conforme a imagem a seguir, garantindo que não se soltem em vôo. Não use cola nesse momento, pois em caso de manutenção, você não terá acesso ao circuito eletrônico.
Fixe o Arduino no plate inferior o mais centralizado possível, encaixe o plate nos braços e parafuse-os conforme a imagem a seguir, garantindo que não se soltem em vôo. Não use cola nesse momento, pois em caso de manutenção, você não terá acesso ao circuito eletrônico. Nesse ponto você já concluiu a montagem por completo do seu frame, faltando apenas a configuração.A configuração será demonstrada em um post futuro. Acompanhe nosso blog e fique por dentro da montagem do drone de MDF.Gostou do projeto e já pretende fazer o seu próprio drone? Deixa ai nos comentários o que você achou e avalie o post.
Nesse ponto você já concluiu a montagem por completo do seu frame, faltando apenas a configuração.A configuração será demonstrada em um post futuro. Acompanhe nosso blog e fique por dentro da montagem do drone de MDF.Gostou do projeto e já pretende fazer o seu próprio drone? Deixa ai nos comentários o que você achou e avalie o post.http://www.brokking.net/ymfc-al_main.html https://blog.eletrogate.com/drones-o-que-sao-como-funcionam-e-como-voam/Conheça a Metodologia Eletrogate e ofereça aulas de robótica em sua escola!
|


