

O rádio controle é amplamente utilizado em hobbies e é muito conhecido por todos nós.Sabe aquele carrinho de controle que você teve ou aquele drone que você viu voando? Ambos são controlados por um rádio controle e tem o princípio de funcionamento idêntico, apesar das diferenças de tecnologia. Vejamos abaixo algumas características:
 Os canais são, a grosso modo, os comandos ou funções que o rádio nos permite ter. São usados para controlar a direção, velocidade e funções extras que o dispositivo controlado necessita em sua operação. A maioria dos rádio controles que temos hoje em dia tem pelo menos 6 canais, sendo 4 principais e 2 destinados a funções extras.
Os canais são, a grosso modo, os comandos ou funções que o rádio nos permite ter. São usados para controlar a direção, velocidade e funções extras que o dispositivo controlado necessita em sua operação. A maioria dos rádio controles que temos hoje em dia tem pelo menos 6 canais, sendo 4 principais e 2 destinados a funções extras. O dispositivo recebe esse nome por funcionar através de radiofrequência, onde a comunicação entre transmissor e receptor é feita atualmente na casa dos 2.4 GHz. Essa tecnologia chegou para substituir os tradicionais rádios de 72 MHz que sofriam com interferências de outros dispositivos atuando na mesma frequência. Quem nunca teve um carrinho de controle e sofreu interferência quando um colega estava brincando com outro carrinho nas proximidades, não é? Essa mudança de tecnologia fez com que os rádios de hoje sejam muito mais confiáveis e tenham um alcance considerável, sendo possível chegar na a vários quilômetros dependendo do local e da qualidade do transmissor.
O dispositivo recebe esse nome por funcionar através de radiofrequência, onde a comunicação entre transmissor e receptor é feita atualmente na casa dos 2.4 GHz. Essa tecnologia chegou para substituir os tradicionais rádios de 72 MHz que sofriam com interferências de outros dispositivos atuando na mesma frequência. Quem nunca teve um carrinho de controle e sofreu interferência quando um colega estava brincando com outro carrinho nas proximidades, não é? Essa mudança de tecnologia fez com que os rádios de hoje sejam muito mais confiáveis e tenham um alcance considerável, sendo possível chegar na a vários quilômetros dependendo do local e da qualidade do transmissor. O receptor é o responsável por receber e repassar os comandos que o usuário quer aplicar a um determinado dispositivo. Esses comandos são enviados através de pulsos, normalmente PWM, que são destinados a controlar o ângulo de um servo motor ou a velocidade de um motor, estando este conectado a um ESC.Agora, melhor que somente entender os detalhes e características de um equipamento tão sofisticado e relativamente caro é poder construir e adaptar um de acordo com sua necessidade e com um custo bem reduzido. Pensando nisso, vamos te ensinar como montar o seu próprio rádio controle baseado no Arduino. Veja só:
O receptor é o responsável por receber e repassar os comandos que o usuário quer aplicar a um determinado dispositivo. Esses comandos são enviados através de pulsos, normalmente PWM, que são destinados a controlar o ângulo de um servo motor ou a velocidade de um motor, estando este conectado a um ESC.Agora, melhor que somente entender os detalhes e características de um equipamento tão sofisticado e relativamente caro é poder construir e adaptar um de acordo com sua necessidade e com um custo bem reduzido. Pensando nisso, vamos te ensinar como montar o seu próprio rádio controle baseado no Arduino. Veja só:
- 1x Pro Mini Atmega328p 5V 16MHz
- 1x Módulo Wireless NRF24L01 + Antena 1km
- 1x Acelerômetro e Giroscópio 3 Eixos 6 DOF MPU6050 - GY-521
- 1x Placa Fenolite Perfurada 10x15cm
- 1x Adaptador Bateria 9V sem Plug
- 1x Micro Chave SS12D00G4 - 3 terminais - 4mm
- 1x Regulador de tensão AM1117 3,3V
- 1x Capacitor Eletrolítico 100uF x 16V
- 1x Capacitor Disco Cerâmico 100nF x 50V
- 2x Módulo Joystick Analógico para Arduino - KY-023
- 2x Chave Alavanca - 3 Posições 3 Terminais
- 2x Potenciômetro 1KΩ
- 4x Push Button (Chave Táctil) 2 pinos
- 1x bateria 9V
- 1x Arduino Pro Mini
- 1x Módulo Wireless NRF24L01 + Antena 1km
- 1x regulador de tensão AM1117 3,3V
- 1x Capacitor 0,1uF
- 1x Placa Fenolite Perfurada 7x5cm
- 1x capacitor 100uF
- 2x Barra de Pinos Macho 1x40 180°
- 1x Cabo Flat Colorido 20 Vias 26awg - 60cm
- 1x Solda Estanho em Fio Hikari HS-63
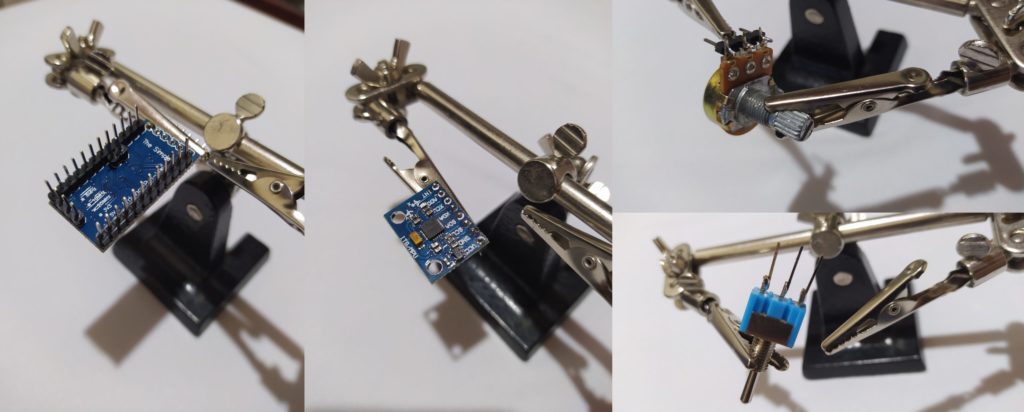
Antes de prosseguirmos, vamos apresentar alguns componentes novos de forma bem resumida:
 O NRF24L01 é um transceptor, ou seja, é um componente que pode funcionar como transmissor e receptor. Essa configuração nos permite dois tipos de comunicação: a unidirecional, onde temos um transmissor e um receptor fixos, e a bidirecional, onde ambos os lados podem transmitir e receber dados. Suas características incluem a tecnologia 2.4 GHz, baixo consumo de energia, potência do sinal considerável e velocidade de transmissão na casa dos 250Kbps. O módulo que utilizaremos é o NRF24L01+PA+LNA, que possui um amplificador de sinal e uma antena de 2dBi, que nos permite alcançar, segundo o fabricante, distâncias de até 1Km em locais abertos e livres de obstáculos que possam vir a bloquear o sinal.
O NRF24L01 é um transceptor, ou seja, é um componente que pode funcionar como transmissor e receptor. Essa configuração nos permite dois tipos de comunicação: a unidirecional, onde temos um transmissor e um receptor fixos, e a bidirecional, onde ambos os lados podem transmitir e receber dados. Suas características incluem a tecnologia 2.4 GHz, baixo consumo de energia, potência do sinal considerável e velocidade de transmissão na casa dos 250Kbps. O módulo que utilizaremos é o NRF24L01+PA+LNA, que possui um amplificador de sinal e uma antena de 2dBi, que nos permite alcançar, segundo o fabricante, distâncias de até 1Km em locais abertos e livres de obstáculos que possam vir a bloquear o sinal. O módulo MPU6050 é um sensor que possui um acelerômetro e um giroscópio em seu integrado. Cada um desses sensores retorna valores em ângulos nos eixos X, Y e Z correspondentes à movimentação e inclinação de objetos tridimensionais. No nosso projeto, ele será utilizado visando projetos futuros baseados em controle por gestos.
O módulo MPU6050 é um sensor que possui um acelerômetro e um giroscópio em seu integrado. Cada um desses sensores retorna valores em ângulos nos eixos X, Y e Z correspondentes à movimentação e inclinação de objetos tridimensionais. No nosso projeto, ele será utilizado visando projetos futuros baseados em controle por gestos.A montagem, apesar de ter muitas conexões, é bem simples e fácil de entender, basta acompanhar os diagramas e não terá dificuldades. Veja só:
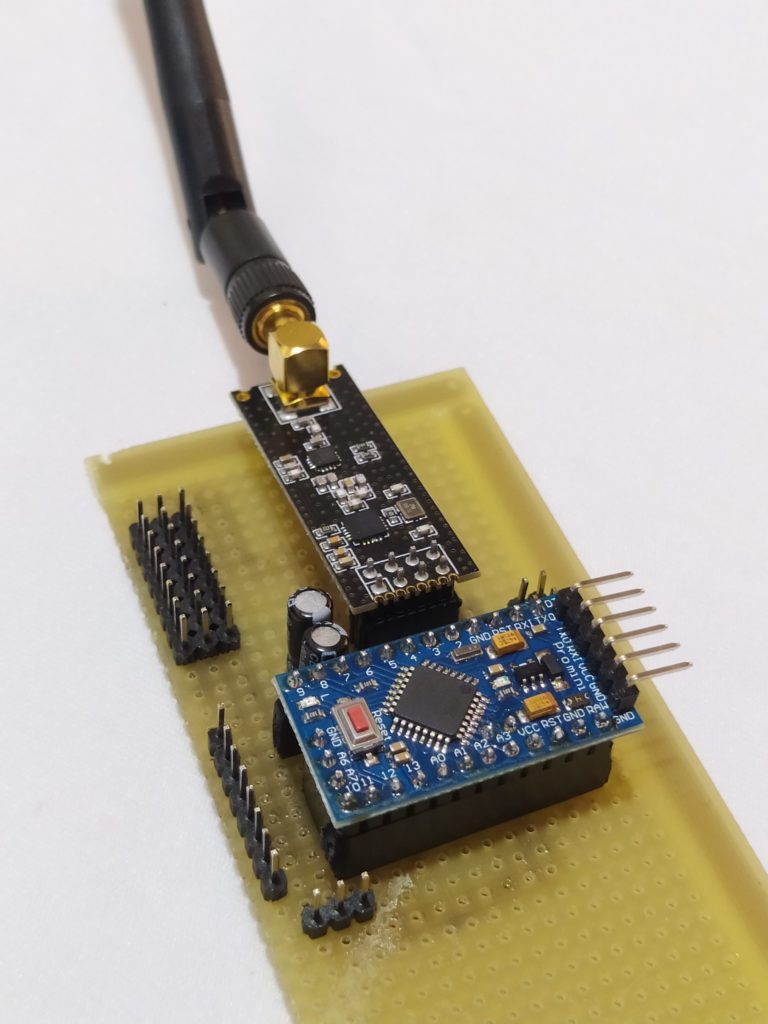
 IMPORTANTE: Alguns joysticks não possuem ilhas de solda na parte superior, o que requer um pouco mais de cuidado e atenção na hora de realizar o processo. Será necessário utilizar um suporte para segurar o módulo e a barra de pinos, para que a soldagem seja realizada por baixo, conforme a foto:
IMPORTANTE: Alguns joysticks não possuem ilhas de solda na parte superior, o que requer um pouco mais de cuidado e atenção na hora de realizar o processo. Será necessário utilizar um suporte para segurar o módulo e a barra de pinos, para que a soldagem seja realizada por baixo, conforme a foto: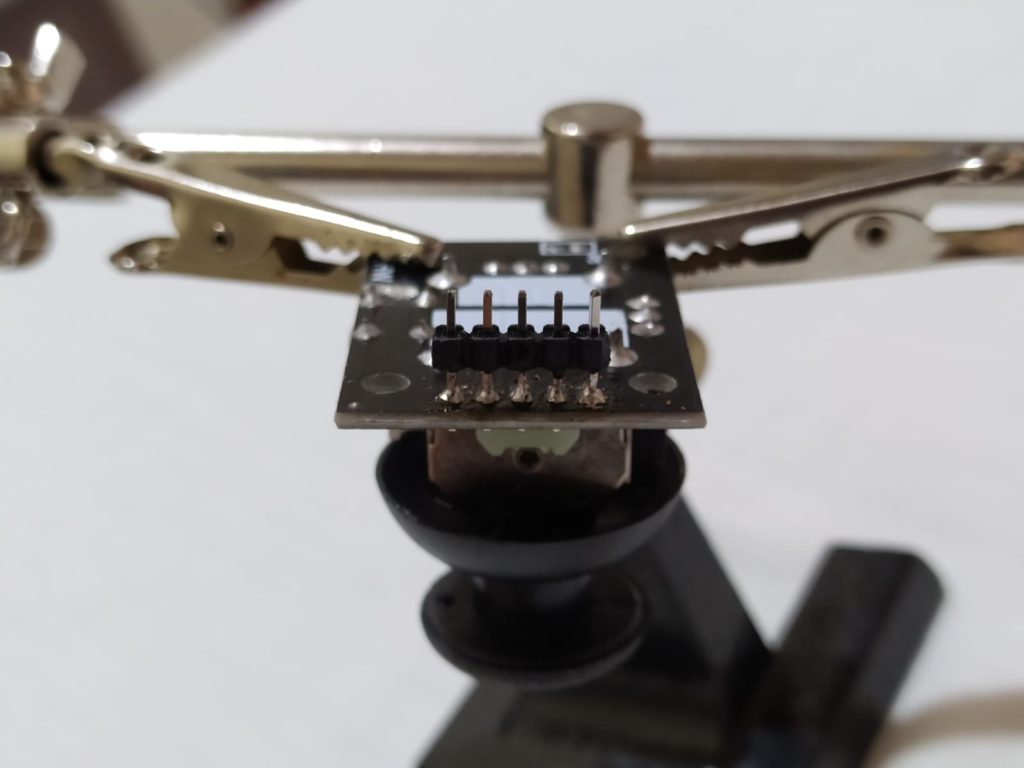 Também recomendamos que remova a parte plástica que envolve os pinos após a solda, ficando dessa forma:Passo 2 – Organização dos componentes na placaApós essa etapa, vamos posicionar os componentes de forma que fiquem confortáveis nas nossas mãos. Tiramos por base a posição dos sticks e chaves de um rádio controle profissional, já que as chaves auxiliares e potenciômetros estão numa posição de fácil acesso sem que seja necessário soltar os sticks.
Também recomendamos que remova a parte plástica que envolve os pinos após a solda, ficando dessa forma:Passo 2 – Organização dos componentes na placaApós essa etapa, vamos posicionar os componentes de forma que fiquem confortáveis nas nossas mãos. Tiramos por base a posição dos sticks e chaves de um rádio controle profissional, já que as chaves auxiliares e potenciômetros estão numa posição de fácil acesso sem que seja necessário soltar os sticks.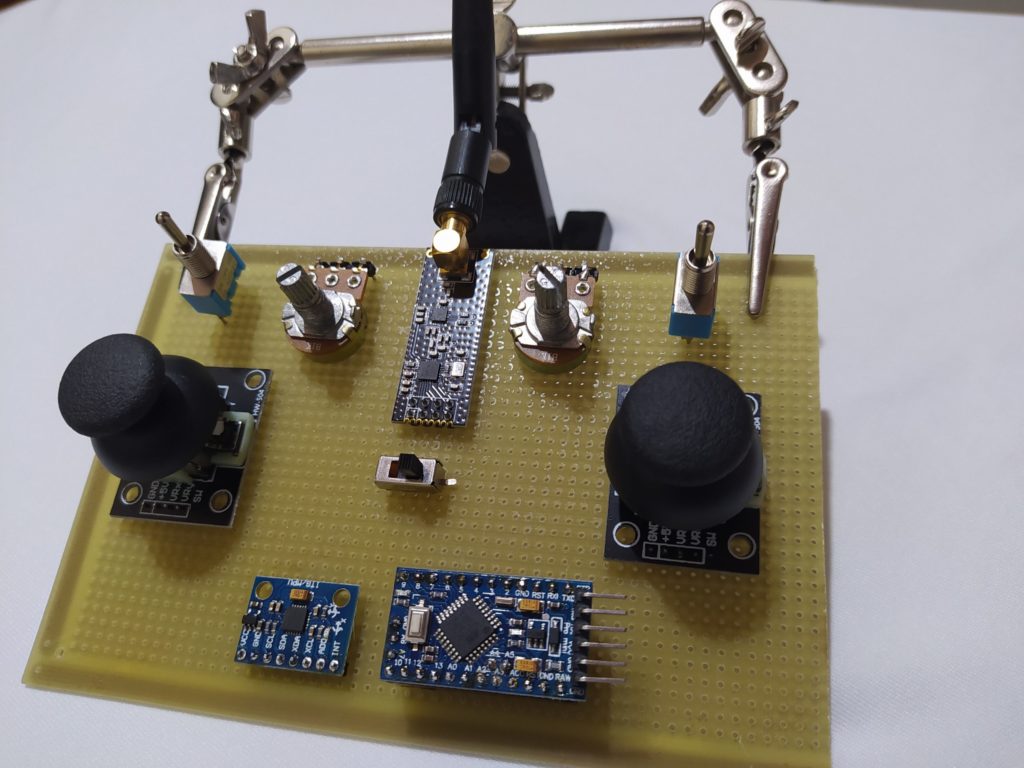 Passo 3 – Soldagem dos componentesDepois de posicionar os componentes, podemos dar início ao processo de soldagem dos mesmos, atentando sempre para não exagerar na solda e unir dois terminaisPasso 4 – Conexões e trilhasCom os componentes já soldados na placa, vamos iniciar as ligações de alimentação e dados. Para isso, você deve seguir fielmente as conexões apresentadas no diagrama abaixo e estude a melhor posição para se fazer as trilhas.
Passo 3 – Soldagem dos componentesDepois de posicionar os componentes, podemos dar início ao processo de soldagem dos mesmos, atentando sempre para não exagerar na solda e unir dois terminaisPasso 4 – Conexões e trilhasCom os componentes já soldados na placa, vamos iniciar as ligações de alimentação e dados. Para isso, você deve seguir fielmente as conexões apresentadas no diagrama abaixo e estude a melhor posição para se fazer as trilhas.Créditos: howtomechatronics.com
Recomendamos que façam as trilhas de alimentação primeiro, respeitando sempre as tensões e polaridades. Isso garantirá que você não vai esquecer de alimentar nada no circuito!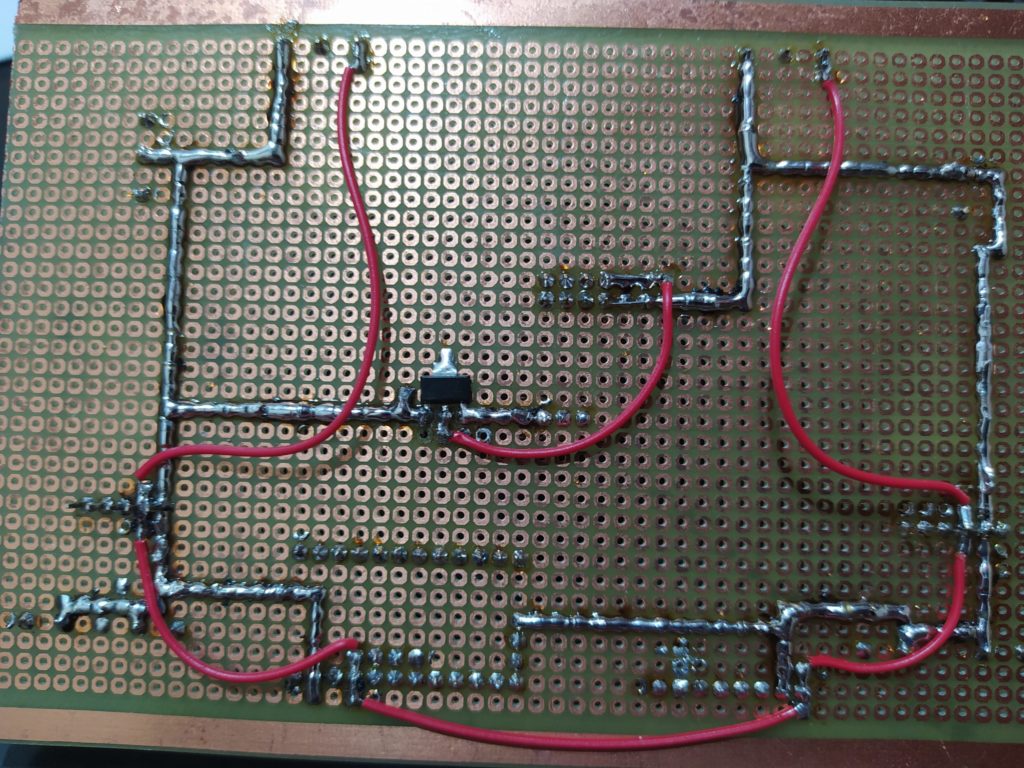 Note também que soldamos o regulador de tensão bem próximo ao módulo NRF24L01edr4, pois somente ele usará a tensão de 3,3V em todo o projeto. Lembre-se também de soldar respectivos os capacitores conforme indicado no diagrama.
Note também que soldamos o regulador de tensão bem próximo ao módulo NRF24L01edr4, pois somente ele usará a tensão de 3,3V em todo o projeto. Lembre-se também de soldar respectivos os capacitores conforme indicado no diagrama.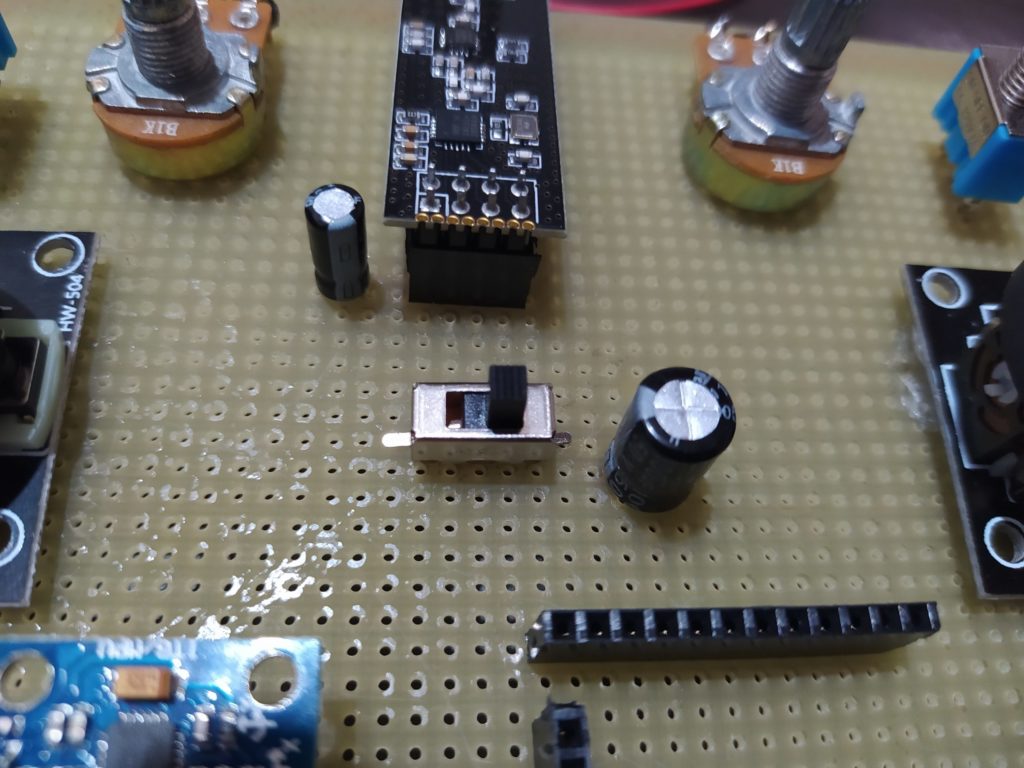 Após isso, basta consultar o esquemático e fazer todas as conexões com os pinos digitais e analógicos do Arduino.Passo 5 – TesteEsse passo é extremamente importante para que você possa verificar erros de conexão que possam ter passado despercebido e evite uma dor de cabeça maior ainda no decorrer da montagem. Para isso, pegue um multímetro e posicione na escala de continuidade. Faça os testes de ponto em ponto, verificando se existe conexão e nenhum terminal está em curto. Para os pontos em comum (GND e VCC), escolha um único ponto e verifique se existe conexão entre ele e os demais de mesma polaridade, assim você garante que tudo está alimentado corretamente.
Após isso, basta consultar o esquemático e fazer todas as conexões com os pinos digitais e analógicos do Arduino.Passo 5 – TesteEsse passo é extremamente importante para que você possa verificar erros de conexão que possam ter passado despercebido e evite uma dor de cabeça maior ainda no decorrer da montagem. Para isso, pegue um multímetro e posicione na escala de continuidade. Faça os testes de ponto em ponto, verificando se existe conexão e nenhum terminal está em curto. Para os pontos em comum (GND e VCC), escolha um único ponto e verifique se existe conexão entre ele e os demais de mesma polaridade, assim você garante que tudo está alimentado corretamente.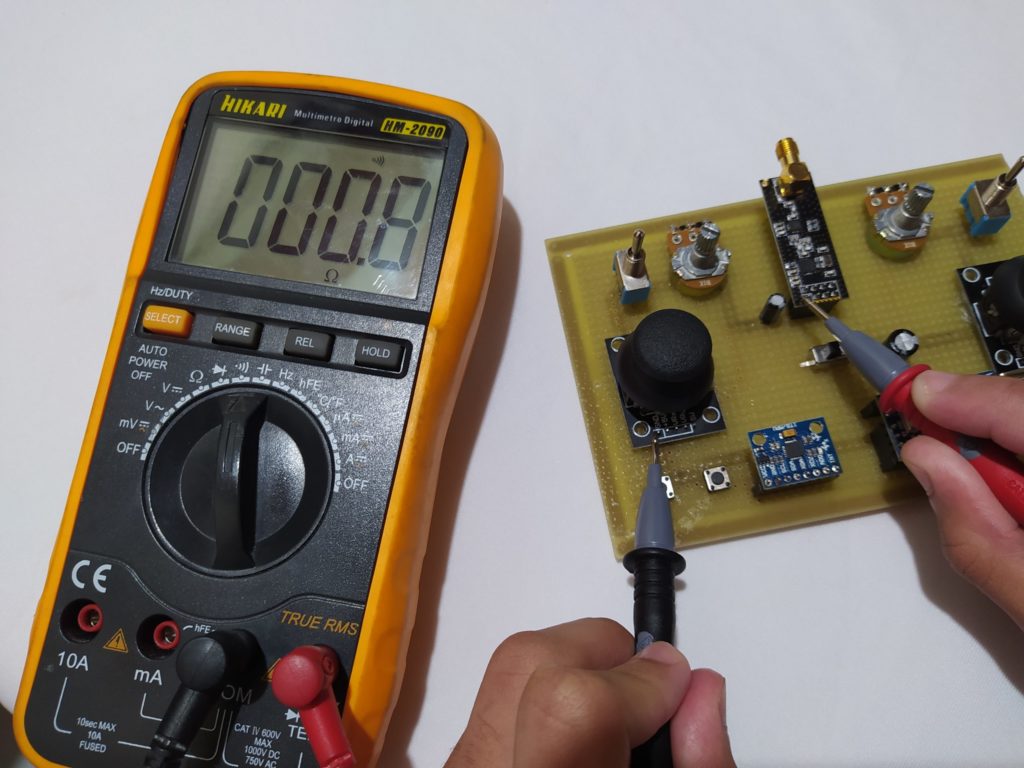 Passo 6 – ProgramaçãoCom todos os testes de continuidade feitos, vamos passar para a programação. Como o Arduino Pro Mini não possui interface USB, vamos precisar de um Arduino Uno ou um conversor USB serial. Se você não sabe como programar esse arduino, sugerimos que acesse nosso post sobre o mesmo clicando aqui.
Passo 6 – ProgramaçãoCom todos os testes de continuidade feitos, vamos passar para a programação. Como o Arduino Pro Mini não possui interface USB, vamos precisar de um Arduino Uno ou um conversor USB serial. Se você não sabe como programar esse arduino, sugerimos que acesse nosso post sobre o mesmo clicando aqui./*
DIY Arduino based RC Transmitter
by Dejan Nedelkovski, www.HowToMechatronics.com
Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Wire.h>
// Define the digital inputs
#define jB1 1 // Joystick button 1
#define jB2 0 // Joystick button 2
#define t1 7 // Toggle switch 1
#define t2 4 // Toggle switch 1
#define b1 8 // Button 1
#define b2 9 // Button 2
#define b3 2 // Button 3
#define b4 3 // Button 4
const int MPU = 0x68; // MPU6050 I2C address
float AccX, AccY, AccZ;
float GyroX, GyroY, GyroZ;
float accAngleX, accAngleY, gyroAngleX, gyroAngleY;
float angleX, angleY;
float AccErrorX, AccErrorY, GyroErrorX, GyroErrorY;
float elapsedTime, currentTime, previousTime;
int c = 0;
RF24 radio(5, 6); // nRF24L01 (CE, CSN)
const byte address[6] = "00001"; // Address
// Max size of this struct is 32 bytes - NRF24L01 buffer limit
struct Data_Package {
byte j1PotX;
byte j1PotY;
byte j1Button;
byte j2PotX;
byte j2PotY;
byte j2Button;
byte pot1;
byte pot2;
byte tSwitch1;
byte tSwitch2;
byte button1;
byte button2;
byte button3;
byte button4;
};
Data_Package data; //Create a variable with the above structure
void setup() {
Serial.begin(9600);
// Initialize interface to the MPU6050
initialize_MPU6050();
// Call this function if you need to get the IMU error values for your module
//calculate_IMU_error();
// Define the radio communication
radio.begin();
radio.openWritingPipe(address);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_LOW);
// Activate the Arduino internal pull-up resistors
pinMode(jB1, INPUT_PULLUP);
pinMode(jB2, INPUT_PULLUP);
pinMode(t1, INPUT_PULLUP);
pinMode(t2, INPUT_PULLUP);
pinMode(b1, INPUT_PULLUP);
pinMode(b2, INPUT_PULLUP);
pinMode(b3, INPUT_PULLUP);
pinMode(b4, INPUT_PULLUP);
// Set initial default values
data.j1PotX = 127; // Values from 0 to 255. When Joystick is in resting position, the value is in the middle, or 127. We actually map the pot value from 0 to 1023 to 0 to 255 because that's one BYTE value
data.j1PotY = 127;
data.j2PotX = 127;
data.j2PotY = 127;
data.j1Button = 1;
data.j2Button = 1;
data.pot1 = 1;
data.pot2 = 1;
data.tSwitch1 = 1;
data.tSwitch2 = 1;
data.button1 = 1;
data.button2 = 1;
data.button3 = 1;
data.button4 = 1;
}
void loop() {
// Read all analog inputs and map them to one Byte value
data.j1PotX = map(analogRead(A2), 0, 1023, 0, 255); // Convert the analog read value from 0 to 1023 into a BYTE value from 0 to 255
data.j1PotY = map(analogRead(A0), 0, 1023, 0, 255);
data.j2PotX = map(analogRead(A1), 0, 1023, 0, 255);
data.j2PotY = map(analogRead(A3), 0, 1023, 0, 255);
data.pot1 = map(analogRead(A7), 0, 1023, 0, 255);
data.pot2 = map(analogRead(A6), 0, 1023, 0, 255);
// Read all digital inputs
data.j1Button = digitalRead(jB1);
data.j2Button = digitalRead(jB2);
data.tSwitch2 = digitalRead(t2);
data.button1 = digitalRead(b1);
data.button2 = digitalRead(b2);
data.button3 = digitalRead(b3);
data.button4 = digitalRead(b4);
// If toggle switch 1 is switched on
if (digitalRead(t1) == 0) {
read_IMU(); // Use MPU6050 instead of Joystick 1 for controling left, right, forward and backward movements
}
// Send the whole data from the structure to the receiver
radio.write(&data, sizeof(Data_Package));
}
void initialize_MPU6050() {
Wire.begin(); // Initialize comunication
Wire.beginTransmission(MPU); // Start communication with MPU6050 // MPU=0x68
Wire.write(0x6B); // Talk to the register 6B
Wire.write(0x00); // Make reset - place a 0 into the 6B register
Wire.endTransmission(true); //end the transmission
// Configure Accelerometer
Wire.beginTransmission(MPU);
Wire.write(0x1C); //Talk to the ACCEL_CONFIG register
Wire.write(0x10); //Set the register bits as 00010000 (+/- 8g full scale range)
Wire.endTransmission(true);
// Configure Gyro
Wire.beginTransmission(MPU);
Wire.write(0x1B); // Talk to the GYRO_CONFIG register (1B hex)
Wire.write(0x10); // Set the register bits as 00010000 (1000dps full scale)
Wire.endTransmission(true);
}
void calculate_IMU_error() {
// We can call this funtion in the setup section to calculate the accelerometer and gury data error. From here we will get the error values used in the above equations printed on the Serial Monitor.
// Note that we should place the IMU flat in order to get the proper values, so that we then can the correct values
// Read accelerometer values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 4096.0 ;
AccY = (Wire.read() << 8 | Wire.read()) / 4096.0 ;
AccZ = (Wire.read() << 8 | Wire.read()) / 4096.0 ;
// Sum all readings
AccErrorX = AccErrorX + ((atan((AccY) / sqrt(pow((AccX), 2) + pow((AccZ), 2))) * 180 / PI));
AccErrorY = AccErrorY + ((atan(-1 * (AccX) / sqrt(pow((AccY), 2) + pow((AccZ), 2))) * 180 / PI));
c++;
}
//Divide the sum by 200 to get the error value
AccErrorX = AccErrorX / 200;
AccErrorY = AccErrorY / 200;
c = 0;
// Read gyro values 200 times
while (c < 200) {
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 4, true);
GyroX = Wire.read() << 8 | Wire.read();
GyroY = Wire.read() << 8 | Wire.read();
// Sum all readings
GyroErrorX = GyroErrorX + (GyroX / 32.8);
GyroErrorY = GyroErrorY + (GyroY / 32.8);
c++;
}
//Divide the sum by 200 to get the error value
GyroErrorX = GyroErrorX / 200;
GyroErrorY = GyroErrorY / 200;
// Print the error values on the Serial Monitor
Serial.print("AccErrorX: ");
Serial.println(AccErrorX);
Serial.print("AccErrorY: ");
Serial.println(AccErrorY);
Serial.print("GyroErrorX: ");
Serial.println(GyroErrorX);
Serial.print("GyroErrorY: ");
Serial.println(GyroErrorY);
}
void read_IMU() {
// === Read acceleromter data === //
Wire.beginTransmission(MPU);
Wire.write(0x3B); // Start with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // Read 6 registers total, each axis value is stored in 2 registers
//For a range of +-8g, we need to divide the raw values by 4096, according to the datasheet
AccX = (Wire.read() << 8 | Wire.read()) / 4096.0; // X-axis value
AccY = (Wire.read() << 8 | Wire.read()) / 4096.0; // Y-axis value
AccZ = (Wire.read() << 8 | Wire.read()) / 4096.0; // Z-axis value
// Calculating angle values using
accAngleX = (atan(AccY / sqrt(pow(AccX, 2) + pow(AccZ, 2))) * 180 / PI) + 1.15; // AccErrorX ~(-1.15) See the calculate_IMU_error()custom function for more details
accAngleY = (atan(-1 * AccX / sqrt(pow(AccY, 2) + pow(AccZ, 2))) * 180 / PI) - 0.52; // AccErrorX ~(0.5)
// === Read gyro data === //
previousTime = currentTime; // Previous time is stored before the actual time read
currentTime = millis(); // Current time actual time read
elapsedTime = (currentTime - previousTime) / 1000; // Divide by 1000 to get seconds
Wire.beginTransmission(MPU);
Wire.write(0x43); // Gyro data first register address 0x43
Wire.endTransmission(false);
Wire.requestFrom(MPU, 4, true); // Read 4 registers total, each axis value is stored in 2 registers
GyroX = (Wire.read() << 8 | Wire.read()) / 32.8; // For a 1000dps range we have to divide first the raw value by 32.8, according to the datasheet
GyroY = (Wire.read() << 8 | Wire.read()) / 32.8;
GyroX = GyroX + 1.85; //// GyroErrorX ~(-1.85)
GyroY = GyroY - 0.15; // GyroErrorY ~(0.15)
// Currently the raw values are in degrees per seconds, deg/s, so we need to multiply by sendonds (s) to get the angle in degrees
gyroAngleX = GyroX * elapsedTime;
gyroAngleY = GyroY * elapsedTime;
// Complementary filter - combine acceleromter and gyro angle values
angleX = 0.98 * (angleX + gyroAngleX) + 0.02 * accAngleX;
angleY = 0.98 * (angleY + gyroAngleY) + 0.02 * accAngleY;
// Map the angle values from -90deg to +90 deg into values from 0 to 255, like the values we are getting from the Joystick
data.j1PotX = map(angleX, -90, +90, 255, 0);
data.j1PotY = map(angleY, -90, +90, 0, 255);
}Créditos: Dejan Nedelkovski, www.HowToMechatronics.com
O funcionamento do código está descrito nos comentários ao longo do mesmo e também nas referências do post.Para carregar o código, selecione a opção “Arduino Pro or Pro Mini”, selecione a porta COM e faça o envio.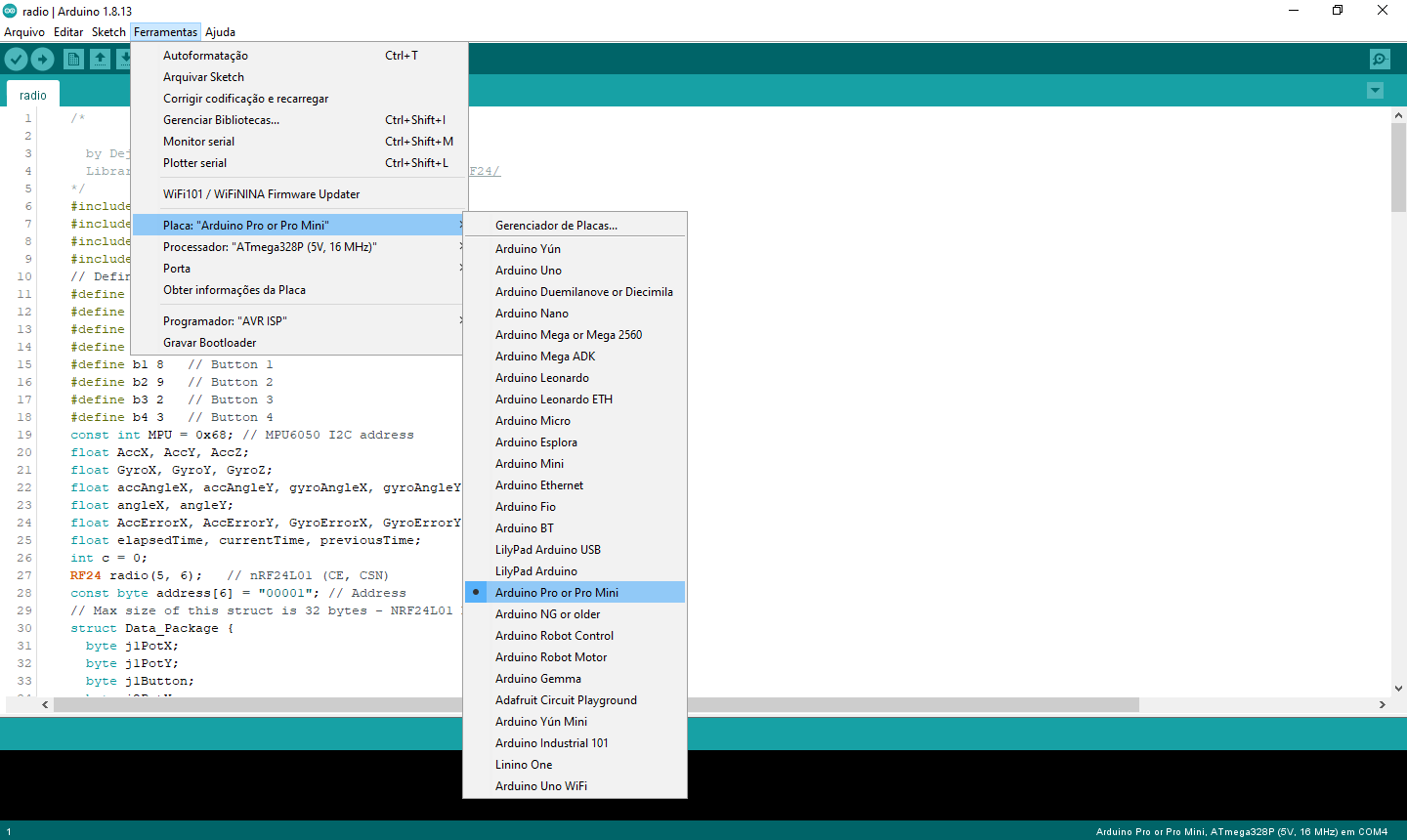 Feito isso, você já pode cuidar da montagem do receptor. Veja só:O receptor, como descrito acima, é a peça que distribui os comandos enviados pelo transmissor, sem ele nada pode ser controlado e por isso também vamos montar um para o nosso transmissor. Ele possuirá 9 canais que podem ser programados de acordo com a sua necessidade.Passo 1 – SoldagemComo primeiro passo, você deve soldar todos os pinos do Arduino, preparando-o para o próximo passo.Passo 2 – Organização dos componentes na placaNessa parte, vamos precisar de:- 3 barras com 8 pinos;
- 2 barras com 3 pinos;
- 1 barra com 6 pinos.
- 1 barra com 3 pinos
- 1 barra com 2 pinosSão elas que permitirão todas as conexões de sinal e alimentação com o receptor.
Para a organização na plaquinha, sugerimos que siga o padrão abaixo:
Feito isso, você já pode cuidar da montagem do receptor. Veja só:O receptor, como descrito acima, é a peça que distribui os comandos enviados pelo transmissor, sem ele nada pode ser controlado e por isso também vamos montar um para o nosso transmissor. Ele possuirá 9 canais que podem ser programados de acordo com a sua necessidade.Passo 1 – SoldagemComo primeiro passo, você deve soldar todos os pinos do Arduino, preparando-o para o próximo passo.Passo 2 – Organização dos componentes na placaNessa parte, vamos precisar de:- 3 barras com 8 pinos;
- 2 barras com 3 pinos;
- 1 barra com 6 pinos.
- 1 barra com 3 pinos
- 1 barra com 2 pinosSão elas que permitirão todas as conexões de sinal e alimentação com o receptor.
Para a organização na plaquinha, sugerimos que siga o padrão abaixo: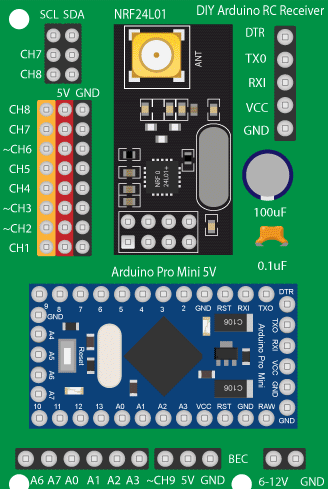
Créditos: howtomechatronics.com
Passo 3- Soldagem dos componentes:O processo aqui será o mesmo do transmissor, mantendo as recomendações referentes às trilhas de alimentação e ao regulador de tensão do módulo RF, lembrando sempre de seguir o diagrama abaixo:Créditos: howtomechatronics.com
IMPORTANTE: Coloque jumpers entre os contatos dos canais 7 e 8, pois são ligados aos pinos TX e RX do Arduino, o que pode causar alguma falha na hora da programação caso estejam conectados.Passo 4 – Trilhas e Conexões:Aqui novamente você deve seguir o diagrama esquemático do receptor, para que não haja ligações erradas e seu dispositivo apresente um mal funcionamento.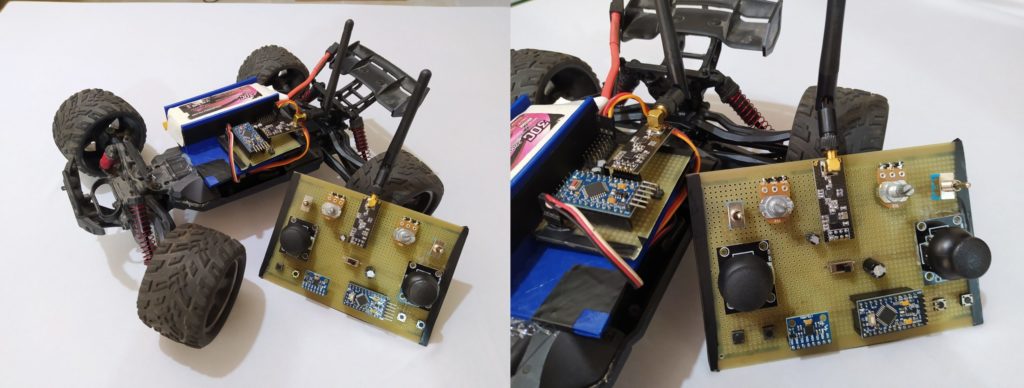 Passo 5 – TesteNovamente recomendamos que você faça os testes de continuidade já feitos no transmissor. Você deve garantir que não exista nenhum curto circuito entre os pinos e que isso venha causar algum dano ao receptor ou aos componentes conectados a ele.Passo 6 – ProgramaçãoO processo de programação do receptor é o mesmo que foi descrito para o transmissor, basta carregar no Arduino e não terá problemas. As explicações você também encontra ao longo do código e nas referências do post.
Passo 5 – TesteNovamente recomendamos que você faça os testes de continuidade já feitos no transmissor. Você deve garantir que não exista nenhum curto circuito entre os pinos e que isso venha causar algum dano ao receptor ou aos componentes conectados a ele.Passo 6 – ProgramaçãoO processo de programação do receptor é o mesmo que foi descrito para o transmissor, basta carregar no Arduino e não terá problemas. As explicações você também encontra ao longo do código e nas referências do post./*
Arduino RC Airplane
== Receiver Code =
by Dejan, www.HowToMechatronics.com
Library: TMRh20/RF24, https://github.com/tmrh20/RF24/
*/
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
#define led 9
RF24 radio(3, 2); // nRF24L01 (CE, CSN)
const byte address[6] = "00001";
unsigned long lastReceiveTime = 0;
unsigned long currentTime = 0;
Servo throttle; // create servo object to control the ESC
Servo rudderServo;
Servo elevatorServo;
Servo aileron1Servo;
Servo aileron2Servo;
int throttleValue, rudderValue, elevatorValue, aileron1Value, aileron2Value, travelAdjust;
// Max size of this struct is 32 bytes - NRF24L01 buffer limit
struct Data_Package {
byte j1PotX;
byte j1PotY;
byte j1Button;
byte j2PotX;
byte j2PotY;
byte j2Button;
byte pot1;
byte pot2;
byte tSwitch1;
byte tSwitch2;
byte button1;
byte button2;
byte button3;
byte button4;
};
Data_Package data; //Create a variable with the above structure
void setup() {
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, address);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_MAX);
radio.startListening(); // Set the module as receiver
resetData();
throttle.attach(10);
rudderServo.attach(4); // CH1
elevatorServo.attach(5); // CH2
aileron1Servo.attach(6); // CH3
aileron2Servo.attach(7); // CH4
pinMode(led, OUTPUT); // CH6
}
void loop() {
// Check whether we keep receving data, or we have a connection between the two modules
currentTime = millis();
if ( currentTime - lastReceiveTime > 1000 ) { // If current time is more then 1 second since we have recived the last data, that means we have lost connection
resetData(); // If connection is lost, reset the data. It prevents unwanted behavior, for example if a drone jas a throttle up, if we lose connection it can keep flying away if we dont reset the function
}
// Check whether there is data to be received
if (radio.available()) {
radio.read(&data, sizeof(Data_Package)); // Read the whole data and store it into the 'data' structure
lastReceiveTime = millis(); // At this moment we have received the data
}
// Controlling throttle - brushless motor with ESC
throttleValue = constrain(data.j1PotY, 80, 255); // Joysticks stays in middle. So we only need values the upper values from 130 to 255
throttleValue = map(throttleValue, 80, 255, 1000, 2000);
throttle.writeMicroseconds(throttleValue);
// Adjusting the servos responsiveness
travelAdjust = map(data.pot2, 0, 255, 0, 25);
// Elevator control
elevatorValue = map(data.j2PotY, 0, 255, (85 - travelAdjust), (35 + travelAdjust));
elevatorServo.write(elevatorValue);
// Ailerons control
aileron1Value = map(data.j2PotX, 0, 255, (10 + travelAdjust), (80 - travelAdjust));
aileron1Servo.write(aileron1Value);
aileron2Servo.write(aileron1Value);
// Rudder trimming function
if (data.j1PotX > 127) {
aileron1Value = data.pot1 + (data.j2PotX - 127);
}
if (data.j1PotX < 127) {
aileron1Value = data.pot1 - (127 - data.j2PotX);
}
// Rudder control
rudderValue = map(rudderValue, 0, 255, (10 + travelAdjust), (90 - travelAdjust));
rudderServo.write(rudderValue);
// Monitor the battery voltage
int sensorValue = analogRead(A3);
float voltage = sensorValue * (5.00 / 1023.00) * 3; // Convert the reading values from 5v to suitable 12V i
// If voltage is below 11V turn on the LED
if (voltage < 11) {
digitalWrite(led, HIGH);
}
else {
digitalWrite(led, LOW);
}
}
void resetData() {
// Reset the values when there is no radio connection - Set initial default values
data.j1PotX = 127;
data.j1PotY = 80; // Motors stops // the central point of the joystick is not starting point for the throttle, its at value of 80 instead of 127
data.j2PotX = 127;
data.j2PotY = 127;
data.j1Button = 1;
data.j2Button = 1;
data.pot1 = 1;
data.pot2 = 1;
data.tSwitch1 = 1;
data.tSwitch2 = 1;
data.button1 = 1;
data.button2 = 1;
data.button3 = 1;
data.button4 = 1;
}Créditos: Dejan Nedelkovski, www.HowToMechatronics.com
 Para testar, conectamos o receptor a um automodelo elétrico, sendo a direção no canal 1 e o ESC no canal 9 do receptor.
Para testar, conectamos o receptor a um automodelo elétrico, sendo a direção no canal 1 e o ESC no canal 9 do receptor. Veja só um vídeo do funcionamento do nosso rádio controle:
Veja só um vídeo do funcionamento do nosso rádio controle:Com esse sistema montado vamos iniciar uma série de projetos rádio controlados, visando entreter, conhecer e desenvolver novos projetos relacionados ao fascinante mundo da programação e eletrônica proporcionados pelo Arduino. Você também pode alterar o projeto e os códigos de acordo com a necessidade. Sua imaginação é o limite!!
https://howtomechatronics.com/projects/diy-arduino-rc-transmitter/https://howtomechatronics.com/projects/diy-arduino-rc-receiver/https://howtomechatronics.com/projects/arduino-rc-airplane-diy/
|



