

Robôs seguidores de linha são máquinas capazes de percorrer um determinado trajeto por marcações no chão. Isso é possível graças à presença de sensores que identificam as diferenças de cor ao longo do percurso e informam ao microcontrolador esses dados recolhidos, permitindo que, em conjunto com a lógica de programação ali presente, o robô tome decisões e tenha “conhecimento” do caminho que deve seguir.Este projeto usa componentes do Kit Arduino Robótica e é abordado, também, na https://conteudo.eletrogate.com/apostila-arduino-robotica.
Passo 1: posicione os 4 pilares de suporte para a roda boba conforme a imagem abaixo: Passo 2: Parafuse-os no chassi e, em seguida, parafuse a roda boba sobre eles.
Passo 2: Parafuse-os no chassi e, em seguida, parafuse a roda boba sobre eles. Passo 3: Solde ou amarre os fios nos motores, conforme a imagem abaixo:
Passo 3: Solde ou amarre os fios nos motores, conforme a imagem abaixo: Passo 4: Posicione os suportes do motor e, em seguida, parafuse os mesmos, como ilustrado abaixo:
Passo 4: Posicione os suportes do motor e, em seguida, parafuse os mesmos, como ilustrado abaixo: Passo 5: O próximo passo é fixar o suporte de pilhas e o interruptor no chassi. Veja a disposição dos mesmos a seguir:
Passo 5: O próximo passo é fixar o suporte de pilhas e o interruptor no chassi. Veja a disposição dos mesmos a seguir: Passo 6: Com o suporte e o interruptor posicionados, você deverá adicionar o interruptor em série com o suporte de pilhas. Para isso, basta cortar o fio vermelho (positivo) e soldá-lo no interruptor, conforme ilustrado abaixo:
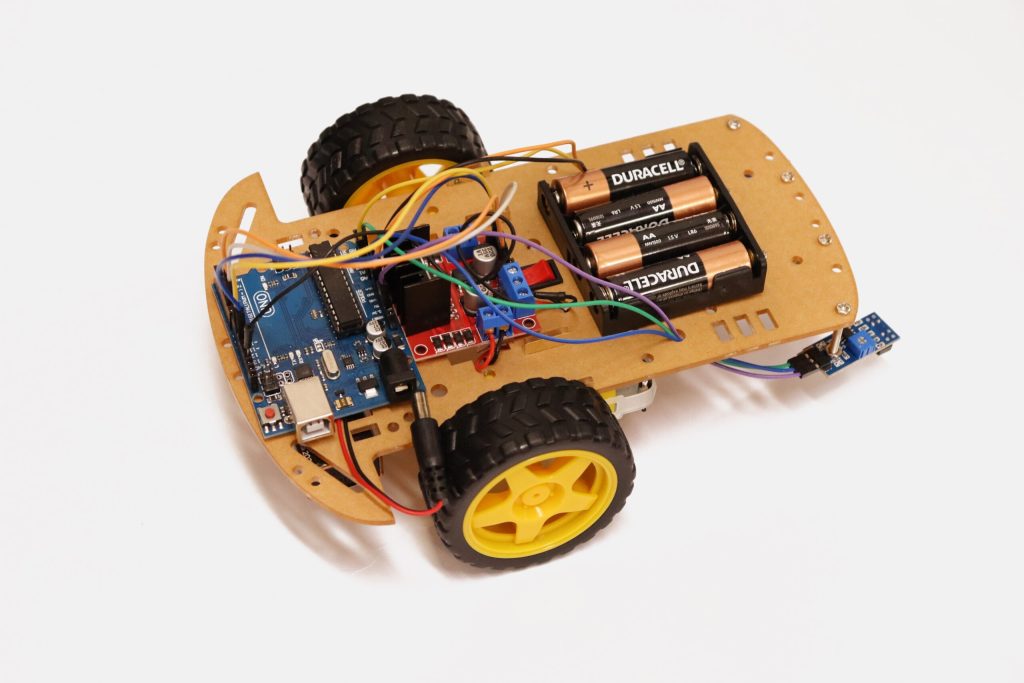
Passo 6: Com o suporte e o interruptor posicionados, você deverá adicionar o interruptor em série com o suporte de pilhas. Para isso, basta cortar o fio vermelho (positivo) e soldá-lo no interruptor, conforme ilustrado abaixo: Passo 7: Terminado isso, a parte física do seu chassi estará montada, restando agora posicionar os demais componentes eletrônicos ao longo do chassi. Nossa disposição ficou da seguinte forma:
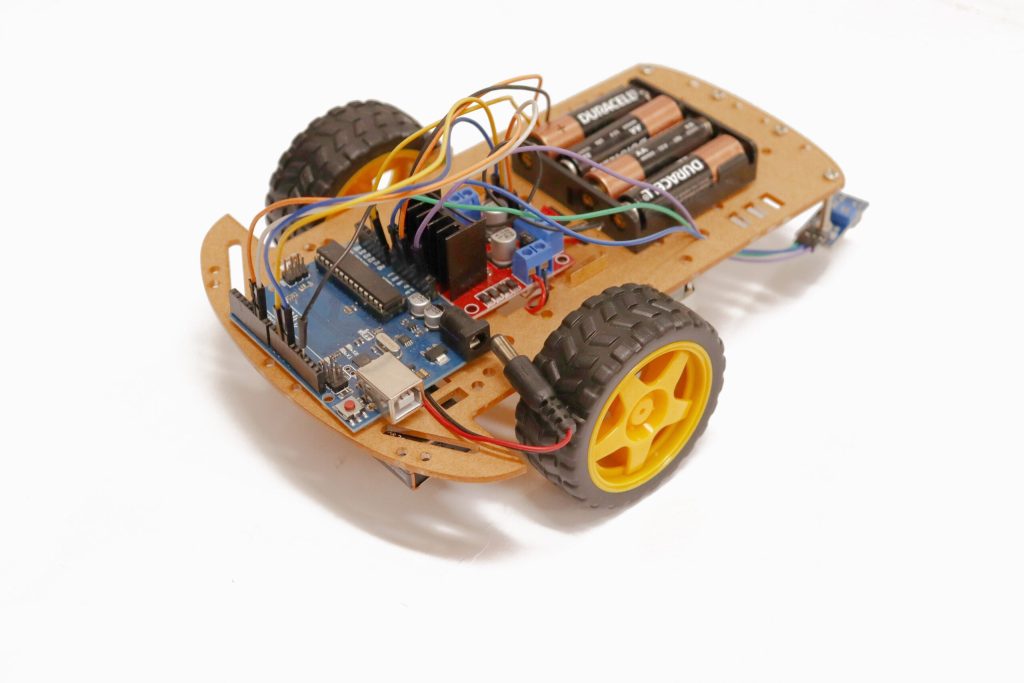
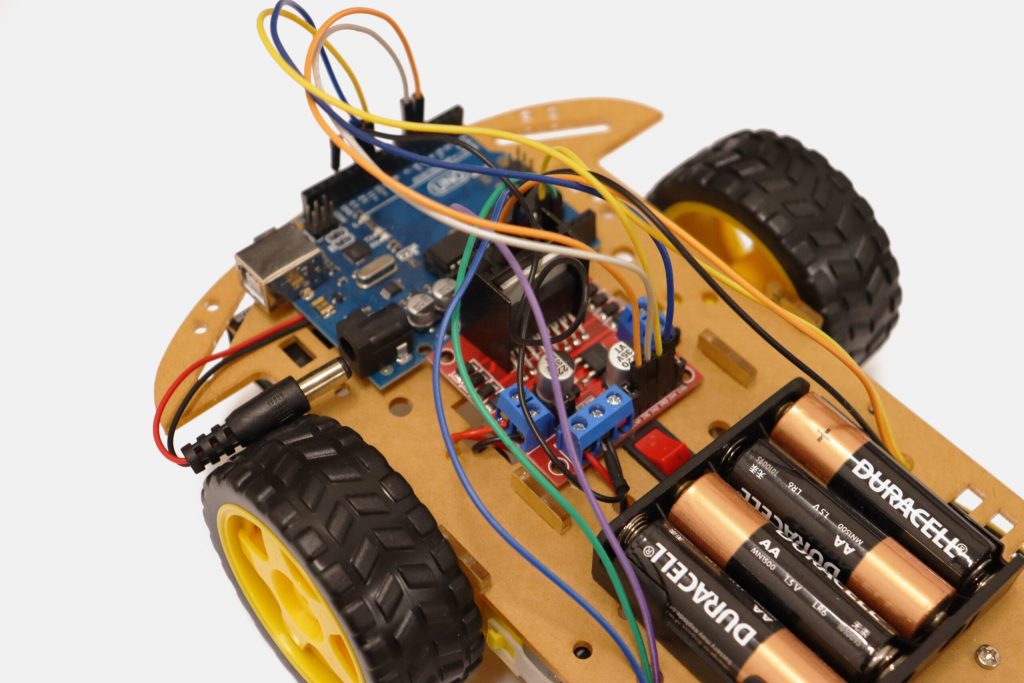
Passo 7: Terminado isso, a parte física do seu chassi estará montada, restando agora posicionar os demais componentes eletrônicos ao longo do chassi. Nossa disposição ficou da seguinte forma: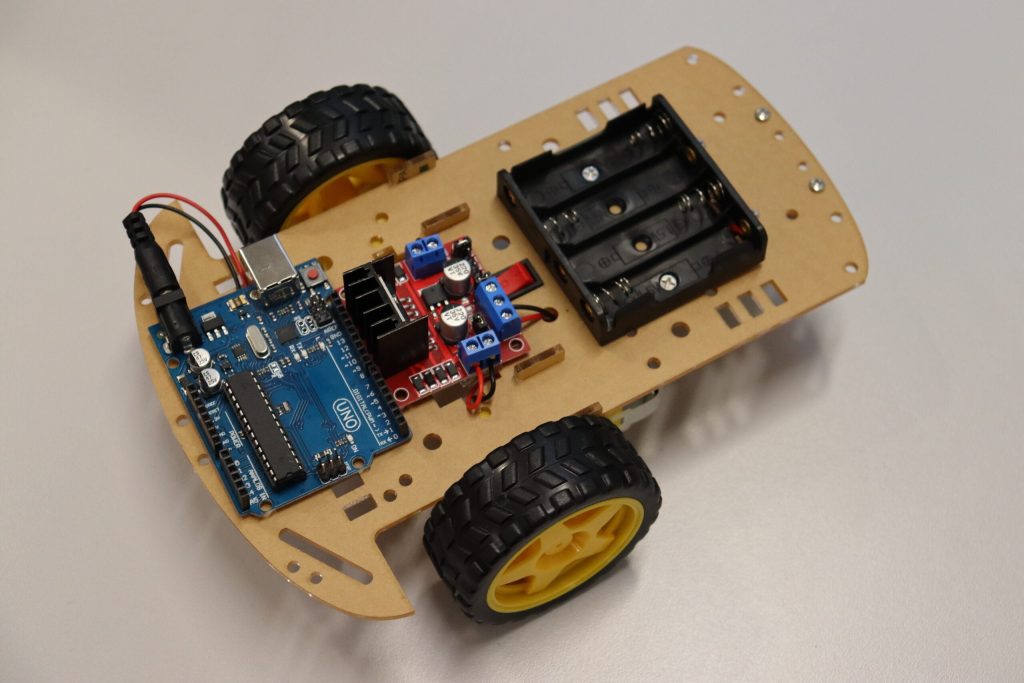 Passo 8: Após, com os parafusos e porcas inclusos no kit, fixe os módulos seguidores de linha na parte frontal do chassi, como nas imagens que seguem.
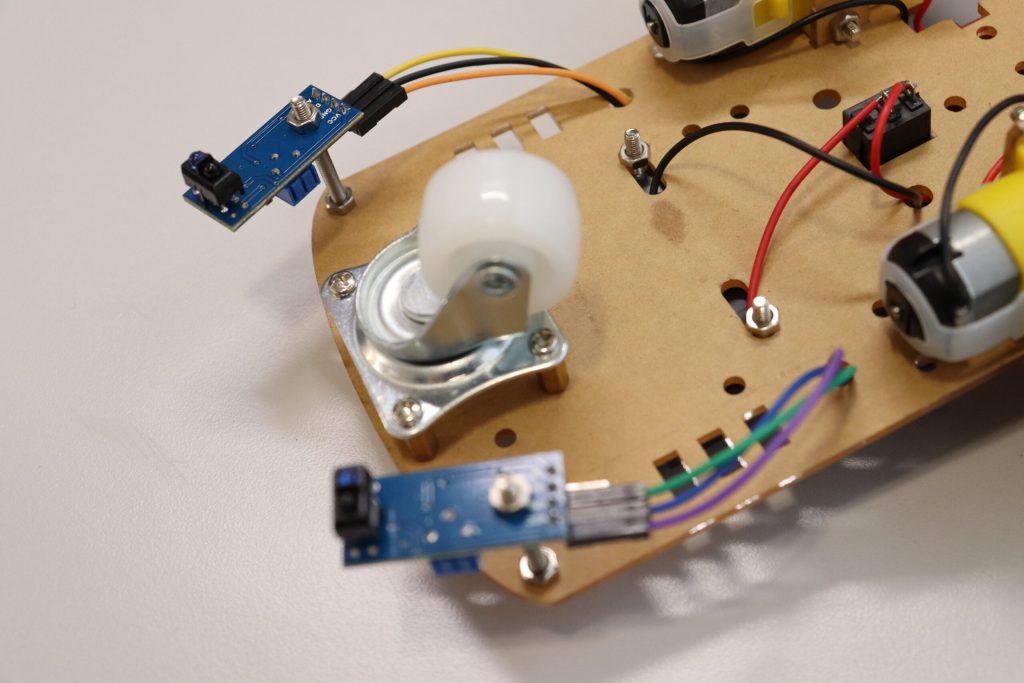
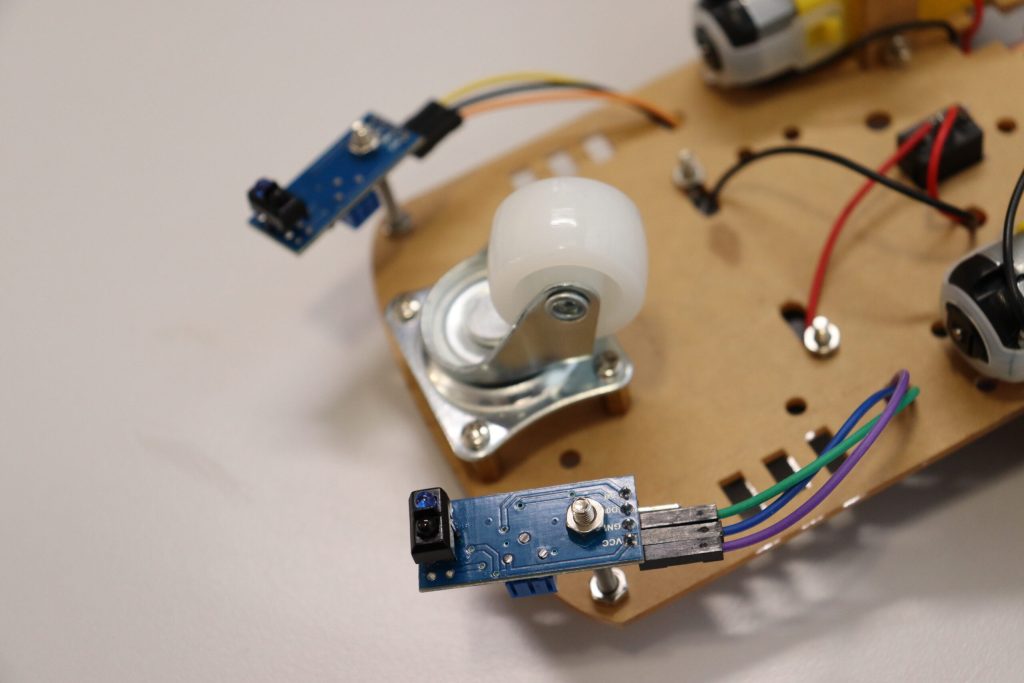
Passo 8: Após, com os parafusos e porcas inclusos no kit, fixe os módulos seguidores de linha na parte frontal do chassi, como nas imagens que seguem.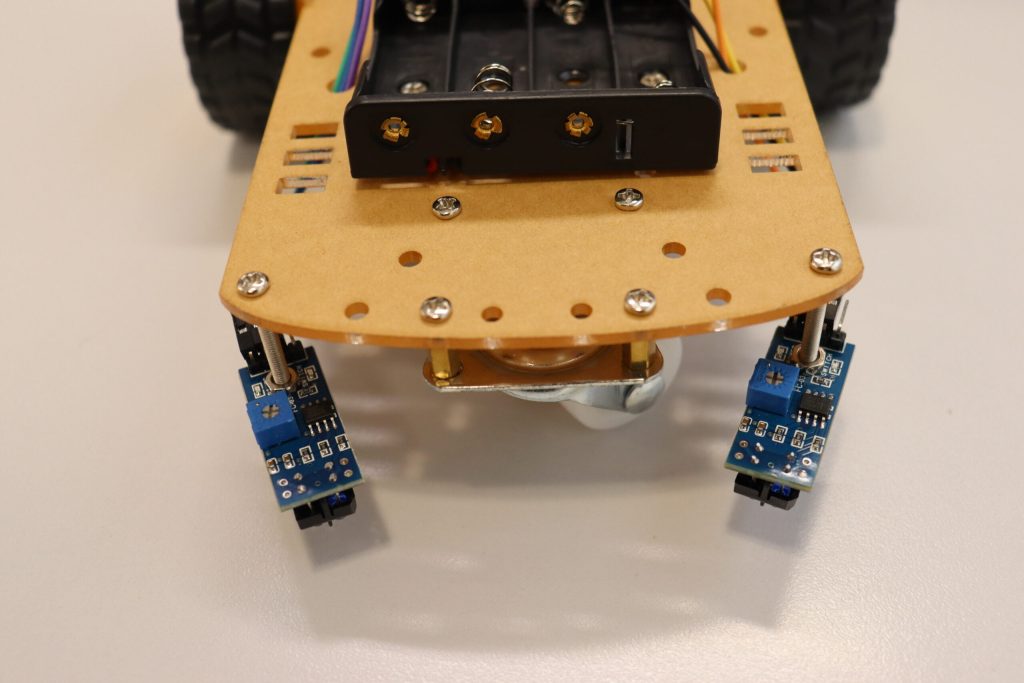
 Passo 9: Por fim, conecte os componentes como no diagrama abaixo.
Passo 9: Por fim, conecte os componentes como no diagrama abaixo. O nosso, ficou assim:
O nosso, ficou assim:
const int8_t mDirF = 5, mDirT = 6, // declara o pino
mEsqF = 10, mEsqT = 11, // associado a
sDir = A0, sEsq = A1; // cada sinal
void setup() {
pinMode(sDir, INPUT); // configura os pinos
pinMode(sEsq, INPUT); // como entradas
}
void loop() {
static const uint8_t vel = 100; // altere a velocidade conforme sua pista
// curvas fechadas exigem velocidades menores
analogWrite(mEsqF, vel * !digitalRead(sEsq)); // o motor esquerdo avança enquanto o
// sensor esquerdo não detectar uma linha
analogWrite(mEsqT, vel * digitalRead(sEsq)); // quando detecta, dá ré
analogWrite(mDirF, vel * !digitalRead(sDir)); // o motor direito avança enquanto o
// sensor direito não detectar uma linha
analogWrite(mDirT, vel * digitalRead(sDir)); // quando detecta, dá ré
}
|


