

A criação do termo robótica pode ser atribuída a Isaac Asimov, escritor de ficção científica que em seus contos conseguiu olhar décadas no futuro e imaginar cenários e criações que estão começando a surgir apenas agora. Dentro dessa ciência que nasceu na imaginação de grandes homens existem diversos assuntos que podem ser abordados; os níveis de inteligência de um robô, como ele percebe o mundo a sua volta e até que ponto é necessária a sua presença no mundo físico para ser considerado um robô verdadeiramente.Inicialmente vamos compreender alguns conceitos, a robótica aborda a eletrônica, a mecânica e a programação necessária para criar um robô, que por conceito é um sistema autônomo que existe no mundo físico, com capacidade de perceber o mundo a sua volta e interagir com o mesmo para atingir determinado objetivo. Tanto robôs aspiradores de pó como os caros e complexos robôs industriais entram nessa definição.Nesse post daremos ênfase às questões mecânicas da robótica, aos atuadores e aos meios utilizados por robôs para se mover pela realidade e para movê-la também.
As tarefas que um robô pode executar estão diretamente ligadas à capacidade que ele possui de locomoção. Na mecânica, o termo Graus de Liberdade (GDL) se refere ao conjunto de deslocamentos e rotações que um corpo ou sistema pode executar, por exemplo, o braço humano, sem contar os dedos da mão, possui 7 graus de liberdade, e isso é bem mais do que a maioria dos braços robóticos possui ou é capaz de possuir.O braço humano é realmente incrível na questão de movimentos que é capaz de produzir, para termos noção um robô industrial possui quase sempre apenas 3 graus de liberdade. Se você leitor está olhando para o seu braço nesse momento e se perguntando como ele pode ser mais eficiente que uma máquina, não se preocupe, vamos observar um boneco articulável que batizei de Bob para demonstrar toda a capacidade de um braço humano. Comprimente os leitores Bob.

 observem que a conexão bola e soquete do nosso ombro possibilita de uma só vez todos esses movimentos, reproduzir essa junção mecanicamente já é um grande desafio, e torná-la funcional utilizando rotores é maior ainda. O quarto GDL está no cotovelo, essa articulação permite apenas 1 único GDL, entretanto em conjunto com o movimento entregue pelo ombro nos permite alcançar milhares de posições.
observem que a conexão bola e soquete do nosso ombro possibilita de uma só vez todos esses movimentos, reproduzir essa junção mecanicamente já é um grande desafio, e torná-la funcional utilizando rotores é maior ainda. O quarto GDL está no cotovelo, essa articulação permite apenas 1 único GDL, entretanto em conjunto com o movimento entregue pelo ombro nos permite alcançar milhares de posições. Até agora já contamos 4 GDL presentes no nosso braço, os outros 3 que ainda faltam estão no nosso pulso, são eles a rotação, a inclinação para frente e para trás e a inclinação para ambos os lados.
Até agora já contamos 4 GDL presentes no nosso braço, os outros 3 que ainda faltam estão no nosso pulso, são eles a rotação, a inclinação para frente e para trás e a inclinação para ambos os lados. 

 A destreza que a espécie humana possui em manipular ferramentas complexas com as mãos se deve em grande parte pelos movimentos que o pulso pode alcançar, deste modo nós conseguimos usar martelos, machados e facas, atualmente pode não parecer grande coisa, mas na pré-história fez uma diferença enorme.Todas essas amplitudes e movimentos que o braço humano pode produzir são resultado de anos de evolução, isso nos proporcionou movimentos com o máximo de eficiência. Por conta dessa eficiência os braços robóticos são desenvolvidos para funcionar e trabalhar de forma semelhante, mas reproduzir todos os 7 GDL do braço humano não é nada fácil.Agora eu vou apresentar um robô desenvolvido para exploração marítima que possui braços mecânicos com 5 GDL cada um, mesmo sendo 2 a menos que o braço humano a complexidade técnica para construir uma máquina com esse grau de liberdade é enorme. Esse robô precisou utilizar manipuladores infláveis para alcançar a capacidade de movimento necessária sem ficar extremamente pesado, como é de costume na maioria dos robôs.
A destreza que a espécie humana possui em manipular ferramentas complexas com as mãos se deve em grande parte pelos movimentos que o pulso pode alcançar, deste modo nós conseguimos usar martelos, machados e facas, atualmente pode não parecer grande coisa, mas na pré-história fez uma diferença enorme.Todas essas amplitudes e movimentos que o braço humano pode produzir são resultado de anos de evolução, isso nos proporcionou movimentos com o máximo de eficiência. Por conta dessa eficiência os braços robóticos são desenvolvidos para funcionar e trabalhar de forma semelhante, mas reproduzir todos os 7 GDL do braço humano não é nada fácil.Agora eu vou apresentar um robô desenvolvido para exploração marítima que possui braços mecânicos com 5 GDL cada um, mesmo sendo 2 a menos que o braço humano a complexidade técnica para construir uma máquina com esse grau de liberdade é enorme. Esse robô precisou utilizar manipuladores infláveis para alcançar a capacidade de movimento necessária sem ficar extremamente pesado, como é de costume na maioria dos robôs.
Os robôs usam motores elétricos, esses motores desenvolvem um movimento de rotação em torno de um eixo, essa rotação é convertida mecanicamente para se transformar em um movimento de vai e volta e só então movimentar uma parte do braço. Geralmente é necessário um motor elétrico para cada GDL que se pretende possuir, então pelo menos 7 motores diferentes são necessários para construir um braço tão bom quando o nosso, para dois braços já são 14 motores. São tantos motores necessários que no final o robô acaba consumindo muita energia e não entregando quase nenhuma performance, não é coincidência que robôs industriais terem apenas um braço e menos graus de liberdade, é tão caro construir um braço com rotores de 7 GDL que acaba não valendo a pena.Os músculos com seu movimento de contrair e relaxar conseguem desenvolver muitos movimentos diferentes, os 4 músculos do nosso ombro tem mais mobilidade do que 4 motores elétricos juntos, Bob demonstrou isso lá em cima agora pouco.Mas a solução para esse problema de movimento robótico é apenas construir um músculo robótico. Se um robô tiver músculos idênticos aos nossos e utilizá-los tão bem quanto, não há motivo para não conseguir a mesma gama de movimentos. Mesmo sendo fácil falar, na prática essa tarefa se provou ser extremamente complicada, tão complicada que originou outro ramo de conhecimento proveniente da robótica, a biomecânica.
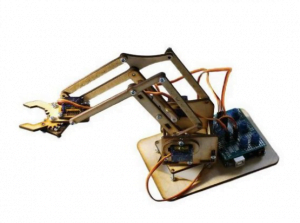
Agora que entendemos os meios pelos quais devemos estudar os braços robóticos vamos por na prática tudo que aprendemos, e que meio melhor para isso do que montar nosso próprio braço robótico.A eletrogate oferece diferentes tipos de braços robóticos, o modelo AS5 conta com 4 graus de liberdade, contando com sua garra, incluindo um GDL que imita o movimento de rotação do pulso humano. 

Ainda me lembro da primeira vez que uma professora me ensinou sobre esse assunto, no primeiro ano do ensino médio Lais Félix me explicou como diferenciar graus de liberdade e levei esse e muitos outros conhecimentos adiante. Espero que esse post tenha feito jus à minha ótima orientadora, para qualquer dúvida estarei atento aos comentários e responderei assim que possível, obrigado por ler!
MATARIĆ, Maja J. Introdução à robótica. Editora Blucher, 2014.PEDERSEN, Jorgen. Bi-manual Dexterous Manipulation for Maritime Explosive Ordnance Disposal. Aerospace & Defense Technology Magazine. Mai. de 2016. Disponível em: <https://www.aerodefensetech.com/component/content/article/adt/features/articles/24645>.Tenha a Metodologia Eletrogate na sua Escola! Conheça nosso Programa de Robótica Educacional.
|


