
Sistemas de transporte automatizado são essenciais em processos industriais modernos. Em linhas de produção, esteiras transportadoras são utilizadas para mover produtos entre etapas, realizar inspeções, contagem de peças e preparação para embalagem. Sensores posicionados ao longo da esteira permitem que sistemas eletrônicos monitorem o fluxo de produção em tempo real, aumentando a produtividade e reduzindo falhas humanas.
Neste projeto, vamos construir uma mini esteira transportadora para contagem de peças, utilizando Arduino, sensor indutivo e um display LCD 16x2. Este projeto simula uma etapa real de uma linha de produção, onde peças são transportadas, detectadas e contabilizadas em tempo real.
O projeto é ideal para:
Nesse artigo será abordado:
Antes de começar a montagem, é importante entender por que este projeto representa um cenário real da indústria. Em fábricas modernas, esteiras transportadoras são utilizadas para:
A contagem automática é especialmente importante porque permite que sistemas supervisórios acompanhem a produção em tempo real, evitando erros humanos e fornecendo dados confiáveis para análise de desempenho. O sistema que construiremos neste tutorial representa exatamente essa etapa: transporte + detecção + contagem + exibição dos dados.
Neste projeto, peças metálicas serão transportadas pela esteira utilizando um tecido TNT como esteira. No meio da esteira será instalado um sensor indutivo responsável por detectar cada peça que passar. A cada detecção, o Arduino incrementará um contador e exibirá a quantidade total no display LCD 16x2.
O funcionamento será o seguinte:
Esse fluxo representa perfeitamente uma estação de contagem de produção em ambiente industrial.
Uma esteira transportadora básica é composta por:
Neste projeto, utilizaremos:
Para desenvolver o projeto iremos precisar de:
Cada componente foi escolhido para representar uma versão simplificada de equipamentos industriais reais.

Os perfis de alumínio foram escolhidos pois são usados em esteiras na indústria e são ideais para projetos pelos seguintes motivos:
Para o projeto da esteira vamos utilizar: 2 perfis de 20x20 de 45cm de comprimento para as laterais, as medidas de largura podem variar conforme seu projeto.
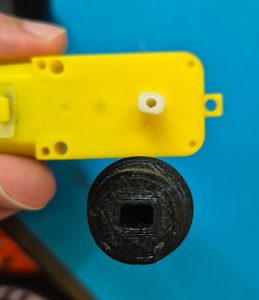
Vamos utilizar dois roletes motorizados que serão conectado ao motor e o rolete livre com rolamento. Todos os roletes serão impressos em 3D.
Iremos utilizar:
A impressão 3D desempenha papel fundamental neste projeto, pois permite criar suportes personalizados com baixo custo. Os arquivos 3D (.STL) podem ser encontrados aqui: arquivos_3D_esteira
Ou nos projetos:
O Arduino será responsável por integrar todos os componentes:
Esse tipo de integração é a base de sistemas de automação industrial.
O motor DC é acionado assim que ligar a chave de alimentação. Vamos utilizar um motor DC com caixa de redução porque ele é ideal e oferece:
Motores sem redução giram rápido demais e possuem pouco torque, o que prejudicaria o transporte das tampas.
O sensor indutivo é um dos sensores mais utilizados na indústria para detecção de peças metálicas. Ele funciona através de um campo eletromagnético. Quando um objeto metálico entra nesse campo, ocorre alteração na oscilação interna do sensor, gerando um sinal elétrico de saída.
Vantagens:
Essas características fazem dele perfeito para linhas de produção.
O display LCD 16x2 foi escolhido por ser:
Ele exibirá a quantidade total de tampas detectadas. Para mais detalhes sobre o display LCD leia o nosso artigo: Guia Completo do Display LCD – Arduino
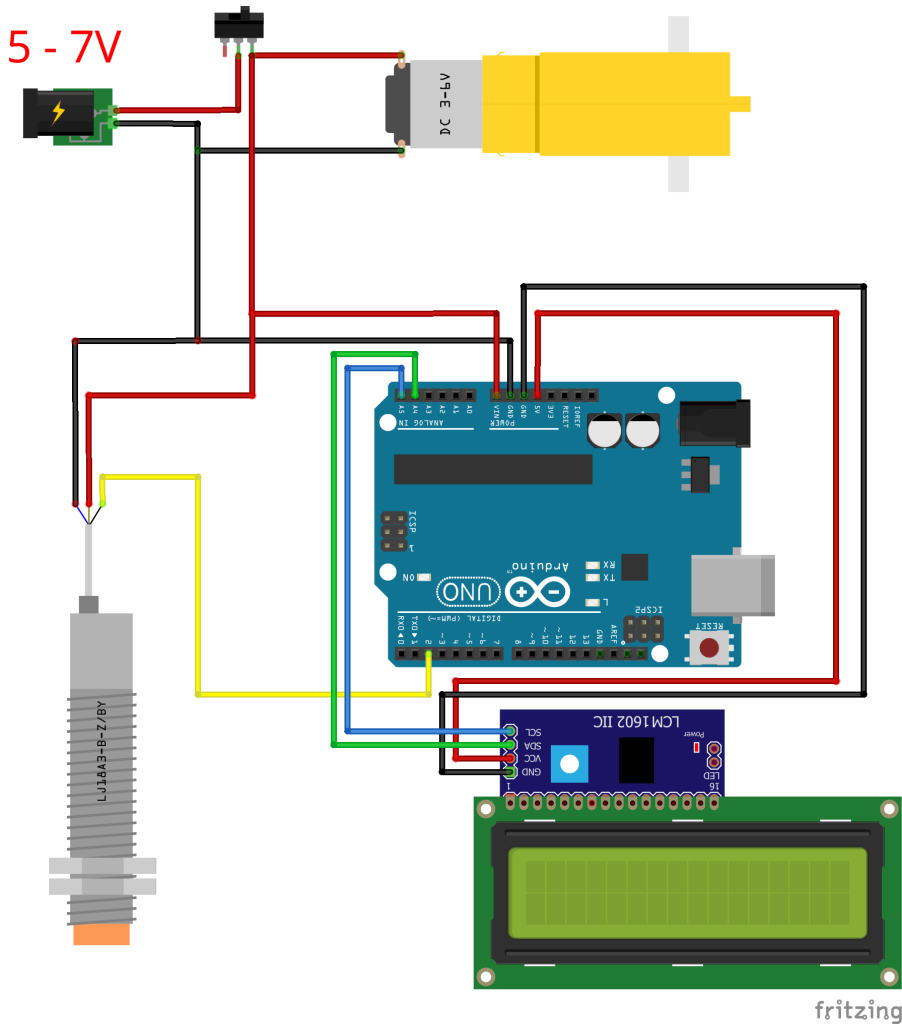
Definição dos Pinos Utilizados
| Sensores | Pino Arduino |
|---|---|
| Sensor indutivo | 2 |
| SDA (LCD) | A4 |
| SCL (LCD) | A5 |
| VCC | 5V |
| GND | GND |
Durante o desenvolvimento deste projeto, a montagem mecânica foi organizada em duas etapas principais para tornar o processo mais didático, organizado e fácil de reproduzir. Em projetos de automação, a parte mecânica costuma ser a mais trabalhosa e, quando executada sem planejamento, pode gerar retrabalho, desalinhamentos e dificuldades na integração com a eletrônica.
A primeira etapa foca na montagem da base estrutural, que é o alicerce de todo o sistema. Garantir que a estrutura esteja rígida, nivelada e bem fixada é essencial para evitar vibrações e desalinhamentos futuros. Se a base não estiver correta, qualquer ajuste posterior se torna mais difícil e pode comprometer o funcionamento da esteira.
Na segunda etapa, aborda a instalação do sistema de acionamento, incluindo o motor e interruptor.
Por fim, a terceira etapa é a montagem dos componentes de movimento, como roletes, rolamentos e esteira. Essa separação permite ajustar o alinhamento mecânico com calma, garantindo que a esteira gire livremente, sem atritos ou folgas excessivas. Trabalhar essa parte separadamente facilita identificar problemas de atrito e tensão antes mesmo de instalar o motor.
Dividir a montagem dessa forma segue a mesma lógica utilizada em ambientes industriais: primeiro estrutura, depois mecânica e por último movimento. Essa abordagem reduz erros, facilita a montagem e torna o projeto mais organizado e confiável.
Nesta primeira etapa vamos montar a estrutura principal da esteira. A montagem correta dessa base facilita todas as etapas seguintes, além de garantir alinhamento e robustez ao conjunto.
A estrutura inicial é composta pelos perfis de alumínio, barras de fixação e cantos estruturais. Siga a sequência apresentada a seguir para obter uma montagem mais rápida e organizada.

A estrutura da esteira é construída utilizando perfis de alumínio, amplamente usados na indústria devido à sua resistência, modularidade e facilidade de manutenção. Comece posicionando os dois perfis paralelos e alinhados. Eles serão a base de sustentação de todos os componentes mecânicos e eletrônicos do projeto.

O uso desse tipo de perfil traz algumas vantagens importantes:
As barras têm a função de manter os perfis firmemente unidos, garantindo estabilidade à estrutura. Neste projeto são utilizadas três barras de fixação. Já os cantos estruturais são componentes essenciais, pois servem para:


 Para a fixação do canto foi utilizado apenas um parafuso e um porca T para cada canto, mas pode ser usadas até 3 como na imagem a abaixo.
Para a fixação do canto foi utilizado apenas um parafuso e um porca T para cada canto, mas pode ser usadas até 3 como na imagem a abaixo.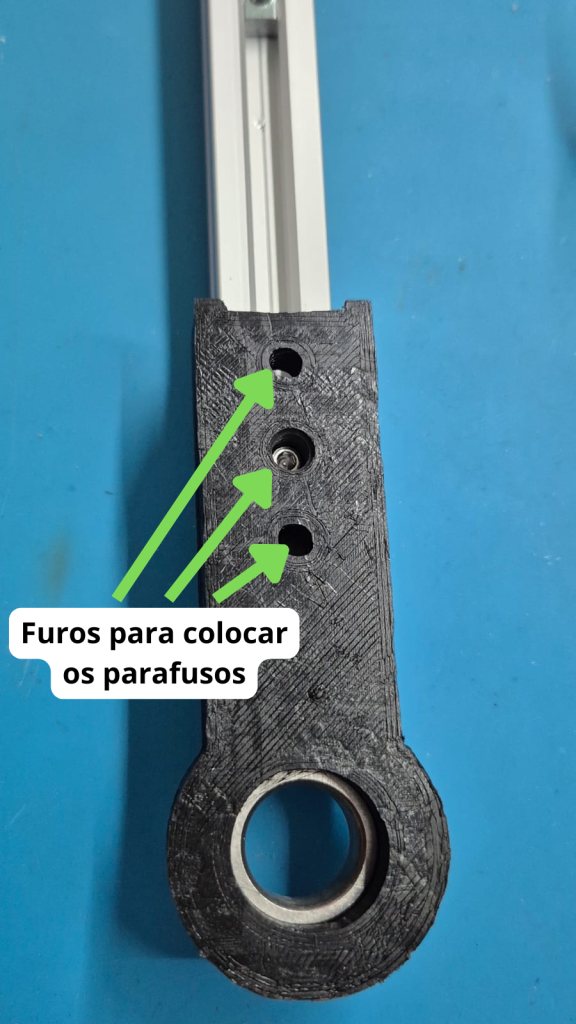
Os rolamentos são responsáveis por permitir que os roletes girem com baixo atrito, garantindo um movimento suave e eficiente da esteira. Realize a fixação dos rolamentos nos cantos estruturais conforme demonstrado nas imagens abaixo. Certifique-se de que estejam bem alinhados, pois qualquer desalinhamento pode causar vibrações ou desgaste prematuro.
![]()

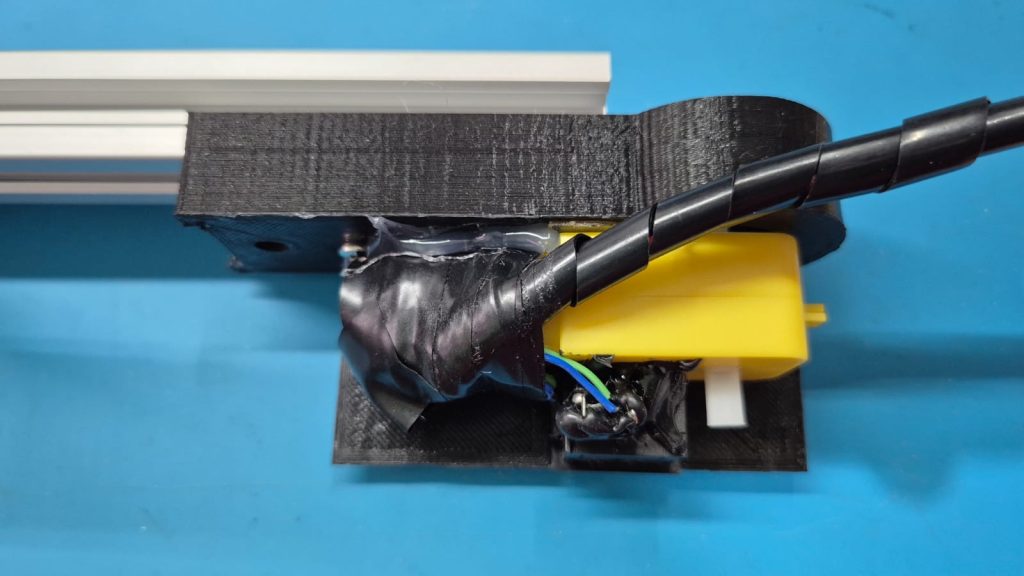 Nessa etapa vamos instalar o motor no suporte de canto como na imagem acima, nos arquivo para impressão 3D tem um arquivo chamado canto_suporte_motor.stl, vamos utilizar ele para encaixar o motor na estrutura, ele tem umas aberturas para encaixar o motor DC. Para encaixar o motor utilize fita dupla face e cola quente, encaixe e cole bem o motor porque ele vibra e essa vibração pode fazer com que ele cair com o tempo.Para instalar o interruptor siga o que está na imagem do esquemático.
Nessa etapa vamos instalar o motor no suporte de canto como na imagem acima, nos arquivo para impressão 3D tem um arquivo chamado canto_suporte_motor.stl, vamos utilizar ele para encaixar o motor na estrutura, ele tem umas aberturas para encaixar o motor DC. Para encaixar o motor utilize fita dupla face e cola quente, encaixe e cole bem o motor porque ele vibra e essa vibração pode fazer com que ele cair com o tempo.Para instalar o interruptor siga o que está na imagem do esquemático.Com a base pronta, vamos partir para a instalação dos componentes responsáveis pelo suporte e movimento da esteira.
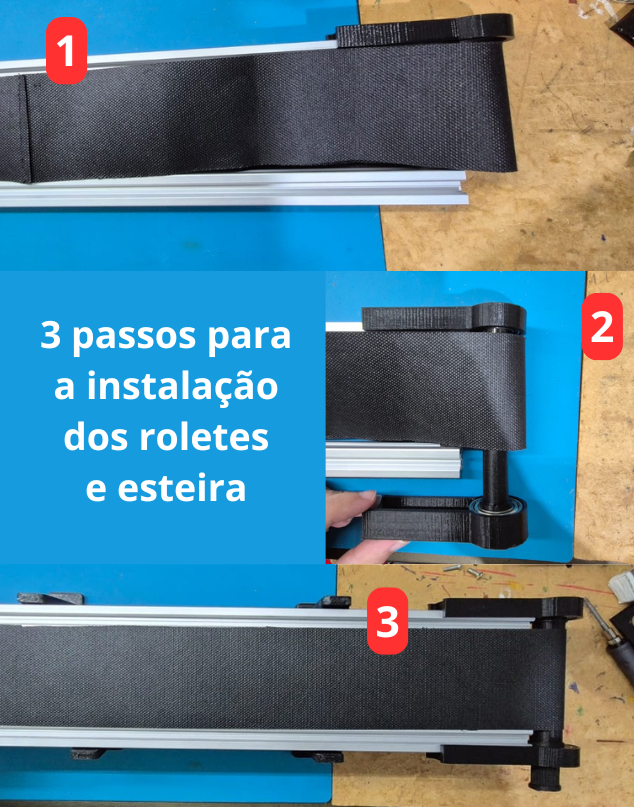
Os roletes são responsáveis por sustentar e movimentar a correia da esteira. O sistema utiliza dois roletes:
Faça a instalação seguindo as imagens abaixo, garantindo que ambos estejam bem alinhados.

Para este projeto foi escolhido o TNT (tecido não tecido) como material da esteira por ser uma solução prática e de baixo custo, as principais vantagens do TNT são:
As medidas utilizadas foram:
Essas dimensões podem variar conforme o tamanho da estrutura.
Para unir as extremidades do TNT, recomenda-se, costura com linha resistente, ou colagem com cola específica para tecido.
O processo de instalação deve seguir a seguinte ordem:
Ajuste de tensão da esteira
A tensão correta da esteira é essencial para evitar deslizamentos durante o funcionamento. O tensionamento é feito deslocando os cantos de uma das extremidades:
A esteira deve ficar bem tensionada, porém sem excesso, garantindo movimento suave e sem sobrecarga no motor.

Instalação dos pés e suporte para o sensor
A esteira tem 4 pés para instalar basta alinhar os pés com as porcas e fixar com parafuso, a distribuição dos pés faça como quiser.
A instalação do sensor pode ser feita em qualquer lugar da esteira, no caso do projeto foi instalada perto do final da esteira, para instalar o sensor use a peça impressa em 3D chamada suporte_sensor.stl, siga os passos da imagem abaixo para instalar o sensor.

Atenção: É fundamental alinhar corretamente o sensor indutivo, pois ele possui uma distância de detecção limitada, que em média é 1 cm. Se ficar muito afastado da esteira, pode não detectar todos os objetos, gerando falhas na contagem. Por outro lado, se ficar muito próximo, existe o risco de contato com as peças em movimento. Por isso, o posicionamento deve ser ajustado com cuidado para garantir leituras confiáveis e seguras.
Agora que toda a parte mecânica e eletrônica está montada, chegou o momento de dar “vida” ao sistema. O Arduino será responsável por duas tarefas principais:
Para facilitar a organização do código, utilizaremos a biblioteca LiquidCrystal, responsável por controlar o display LCD 16x2. Antes de enviar o código, abra a IDE do Arduino e instale a biblioteca, caso ainda não tenha acesse o nosso artigo que sobre o display LCD e sensor indutivo: Contador de objetos com Arduino, sensor indutivo e display LCD.
O funcionamento do código segue a lógica abaixo:
Para evitar contagens duplicadas, utilizamos a técnica de detecção de borda (mudança de estado). Isso garante que cada peça seja contada apenas uma vez, mesmo que o sensor permaneça acionado por alguns milissegundos.
/** * @file Contator_de_obejto.ino * @author Saulo Aislan ([email protected]) * @brief Firmware para o contador de objeto em esteira. * @version 0.1 * @date 2026-03-02 * * @copyright Copyright (c) 2026 * */ #include <Wire.h> #include <LiquidCrystal_I2C.h> LiquidCrystal_I2C lcd(0x3F, 16, 2); #define SENSOR_PIN 2 // interrupção no UNO volatile unsigned long contador = 0; volatile bool objetoDetectado = false; unsigned long ultimoPulso = 0; const int debounceTime = 150; // ms // PROTÓTIPO DA FUNÇÃO void contarObjeto(); void setup() { pinMode(SENSOR_PIN, INPUT_PULLUP); // Iniciar o LCD lcd.init(); lcd.backlight(); lcd.setCursor(0, 0); // Primeira linha do LCD lcd.print("Contador de"); lcd.setCursor(0, 1); // Segunda linha do LCD lcd.print("objetos"); delay(2000); lcd.clear(); // Limpa o dislay LCD lcd.setCursor(0, 0); // Primeira linha do LCD lcd.print("Aguardando"); lcd.setCursor(0, 1); // Segunda linha do LCD lcd.print("Objetos!"); delay(1000); lcd.clear(); attachInterrupt(digitalPinToInterrupt(SENSOR_PIN), contarObjeto, FALLING); } void loop() { if (objetoDetectado) { objetoDetectado = false; lcd.clear(); lcd.setCursor(0,0); lcd.print("Qtd Objetos:"); lcd.setCursor(0,1); lcd.print(contador); } } // FUNÇÃO DA INTERRUPÇÃO void contarObjeto() { unsigned long tempoAtual = millis(); if (tempoAtual - ultimoPulso > debounceTime) { contador++; objetoDetectado = true; ultimoPulso = tempoAtual; } }
Construímos uma esteira funcional capaz de transportar objetos metálicos, detectar automaticamente cada peça e exibir a contagem em tempo real. O projeto demonstra de forma prática conceitos fundamentais de automação industrial e integração de sistemas embarcados.
Mais do que um projeto maker, esta esteira representa uma base sólida para estudos avançados em indústria 4.0 e sistemas de produção automatizados.
Durante o desenvolvimento da esteira, passamos por todas as fases fundamentais de um sistema de automação: planejamento mecânico, impressão 3D de componentes, montagem estrutural, integração eletrônica e programação do microcontrolador. Essa abordagem multidisciplinar mostra como projetos de automação envolvem a união entre mecânica, eletrônica e software, exatamente como acontece na indústria.
Outro ponto importante é que esta esteira foi pensada como uma plataforma didática e expansível. A partir dela, é possível evoluir o sistema com novas funcionalidades, como botões de controle, sensores adicionais, comunicação com a internet, dashboards de monitoramento ou até mesmo sistemas de separação automática. Isso transforma o projeto em uma excelente base para estudos de automação industrial, robótica e Indústria 4.0.
Seja para aprendizado, prototipagem ou uso em laboratório, esta mini esteira demonstra que é possível reproduzir conceitos industriais com baixo custo e grande potencial educacional. Esperamos que este tutorial inspire você a continuar explorando o mundo da automação e a desenvolver projetos cada vez mais completos e inteligentes.
Para mais materiais como esse, continue acompanhando as postagens semanais do blog e não deixe de visitar nossa loja. Lá você encontra todos os componentes necessários para desenvolver esse e muitos outros projetos!Que a força esteja com você!Até mais!
|


