

Para quem dirige, estacionar um carro em uma vaga de garagem é uma tarefa corriqueira, mas que pode apresentar um desafio e prejuízos. Quem nunca “estacionou de ouvido”, colidindo com a parede no fundo, podendo causar danos a esta e ao veículo? Pensando nisso, as montadoras instalaram sensores de estacionamento na traseira dos carros para auxiliar durante o estacionamento. Porém, nem todos os carros possuem este dispositivo. Além disso, dependendo da geometria da sua garagem (ex.: canos), mesmo os carros com estes sensores podem não ser eficazes para evitar a colisão.Neste artigo, mostraremos uma solução que funciona a partir de um sensor ultrassônico colocado na garagem, ao invés de no veículo. LEDs nas cores verde, amarelo e vermelho e um buzzer indicam ao motorista a situação.
Para executar este projeto numa protoboard, precisaremos dos seguintes materiais:
Nosso assistente funcionará da seguinte forma: suponha uma garagem genérica, onde definimos distâncias conforme a figura abaixo: Nosso assistente se ativa ao detectar movimento. Quando for identificado um veículo dentro da garagem, ele acenderá o LED da cor apropriada com base na cor da zona da figura acima. Caso o veículo entre na zona roxa, além de acender o LED vermelho, será acionado, também, um alarme sonoro (buzzer).A detecção de distância se faz através de um sensor ultrassônico. A ausência de variação de distância em um intervalo de tempo (ex: 5 seg) é tida como indicativo de veículo parado, desativando a sinalização.
Nosso assistente se ativa ao detectar movimento. Quando for identificado um veículo dentro da garagem, ele acenderá o LED da cor apropriada com base na cor da zona da figura acima. Caso o veículo entre na zona roxa, além de acender o LED vermelho, será acionado, também, um alarme sonoro (buzzer).A detecção de distância se faz através de um sensor ultrassônico. A ausência de variação de distância em um intervalo de tempo (ex: 5 seg) é tida como indicativo de veículo parado, desativando a sinalização.
O circuito deste artigo é didático, usando uma protoboard e uma Arduino Uno R3. Mais à frente, abordaremos opções para uma montagem prática definitiva.O diagrama do circuito pode ser visto na figura abaixo, assim como sua montagem na protoboard.
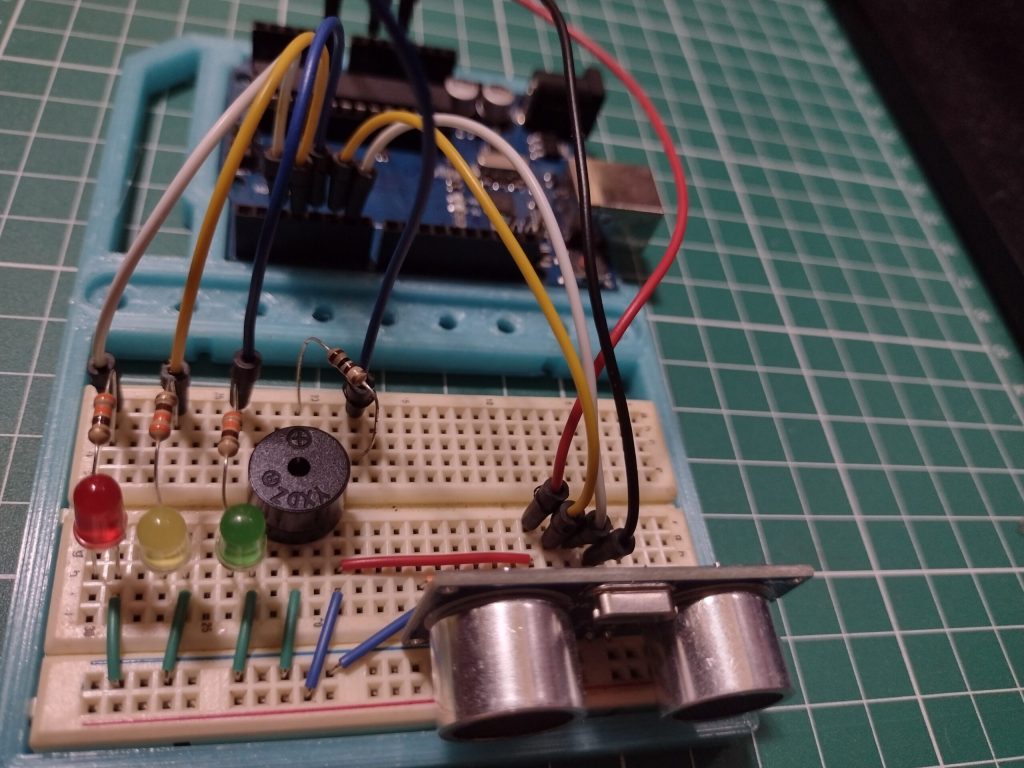 Basicamente, nosso circuito contém uma Arduino tendo uma entrada com o sensor ultrassônico HC-SR04 e 3 saídas com LEDs de cores diferentes (verde, amarelo e vermelho) em série com resistores de 330 Ohms e um buzzer em série com um resistor de 100 ohms.O sensor ultrassônico HC-SR04 funciona através da emissão de um pulso ultrassônico de 10 us (pino Trig), permitindo medir o tempo de retorno do eco deste pulso em algum obstáculo à frente (pino Echo). Ele permite medir distâncias entre 2 cm a 4 m.
Basicamente, nosso circuito contém uma Arduino tendo uma entrada com o sensor ultrassônico HC-SR04 e 3 saídas com LEDs de cores diferentes (verde, amarelo e vermelho) em série com resistores de 330 Ohms e um buzzer em série com um resistor de 100 ohms.O sensor ultrassônico HC-SR04 funciona através da emissão de um pulso ultrassônico de 10 us (pino Trig), permitindo medir o tempo de retorno do eco deste pulso em algum obstáculo à frente (pino Echo). Ele permite medir distâncias entre 2 cm a 4 m. Abaixo, vídeo demonstrando o funcionamento em miniatura:
Abaixo, vídeo demonstrando o funcionamento em miniatura:
O circuito é idêntico ao vídeo de referência. Porém, a programação foi refeita para efeitos de clareza, didática e experimentação.O primeiro ponto a entendermos é o funcionamento do sensor de distância. Para medirmos a distância, precisamos enviar um pulso de 10 us e, depois, verificar o tempo de retorno do eco para indicar a distância. Este tempo é obtido a partir do comando pulseIn(), que mede o tempo do pulso no pino Echo do HC-SR04. Nosso programa utiliza a função MedeDistancia(). O que ela faz é chamar a função DisparaPulsoUltrassonico(), que envia o pulso, obtém o tempo do pulso do HC-SR04 e usa a função CalculaDistancia() para obter a distância em metros, retornando a distância em centímetros (x100). O cálculo é feito com base no trajeto (ida e volta) e a velocidade do som no ar. Para efeitos práticos, desconsideramos o fato do emissor e receptor estarem a uma certa distância, o que geraria um caminho triangular do pulso sonoro.
// Mede a distância do sensor ultrassônico
float MedeDistancia() {
float TempoEcho = 0; // variável tempo do eco
DisparaPulsoUltrassonico(); // dispara pulso ultrassonico
TempoEcho = pulseIn(PinEcho, HIGH); // mede duração do pulso HIGH de eco em micro seg
return CalculaDistancia(TempoEcho) * 100; // retorna distância em cm
}// Envia um pulso de 10 us
void DisparaPulsoUltrassonico() {
digitalWrite(PinTrigger, HIGH); // pulso alto de Trigger
delayMicroseconds(10); // atraso de 10 microsegundos
digitalWrite(PinTrigger, LOW); // pulso baixo de Trigger
}// Calcula a distância com base no tempo do pulso
float CalculaDistancia(float tempo_us) {
return ((tempo_us * velocidadeSom_mpus) / 2); // calcula distancia em metros
}O Loop principal inicialmente mede a distância. Com base nela, o programa verifica se o veículo está parado. Caso não esteja, ele verifica as faixas de distância, começando da mais perto para a mais longe, chamando as funções Sinaliza(faixa) ou desligaSinais(), caso esteja fora da garagem. Estas duas últimas ligam ou desligam os LEDs e buzzer como desejado. Como exemplo, para ligar o LED verde usamos um comando digitalWrite(PinLEDverde, HIGH); Para acionar o buzzer usamos o comando tone(PinBuzzer, 500);Para efeito de debug, usamos o comando Serial.print()/Serial.println() para enviar ao PC dados sobre a distância medida.Para efeito didático e de experimentação, foram criadas algumas constantes e variáveis. Elas foram úteis para ajustar o funcionamento do circuito com uma miniatura. As constantes de limite (ex.: limite verde) contêm os valores, em centímetros, entre o sensor e o limite da faixa em questão. No programa, estes valores estão ajustados para uma miniatura. Porém, podem ser alterados para indicar da forma que for desejado na sua aplicação, em especial.A constante atraso tem a ver com o delay() no loop principal. Em debug, usando os comandos seriais para o PC, este tempo pode ser de 200–500 ms. Na versão final, os comandos seriais podem ser removidos e o atraso reduzido. A constante Maxcontador funciona em conjunto para definir um tempo de 5s para detectar a parada do veículo. A constante tolerância pode ser utilizada para calibrar a detecção de parada de veículo. Como as leituras do HC-SR04 podem indicar pequenas variações, aumentar a tolerância reduz o impacto de “ruídos” na leitura da distância (ver função estaParado).O programa completo pode ser visto abaixo. /* Programa de assistente de garagem com Sensor de Distância Ultrassônico
Blog Eletrogate - https://blog.eletrogate.com/
Arduino Uno - LCD 16/2 azul - IDE 2.1.0
Mauro Vianna 27/junho/2023
*/
// Pinos do arduino utilizados
int PinTrigger = 5; // pino usado para disparar os pulsos do sensor
int PinEcho = 6; // pino usado para ler a saida do sensor
int PinLEDvermelho = 2; // pino usado pelo LED vermelho
int PinLEDamarelo = 3; // pino usado pelo LED amarelo
int PinLEDverde = 4; // pino usado pelo LED verde
int PinBuzzer = A0; // pino usado pelo buzzer
// Variaveis e constantes para controle de distancia
const int atraso = 200; // tempo de espera do loop
const int MaxContador = 5000/atraso; // número de iterações para considerar parado (5s)
const float tolerancia = 1.0; // tolerancia para detecção de movimento
const float velocidadeSom_mps = 340; // em metros por segundo
const float velocidadeSom_mpus = 0.000340; // em metros por microsegundo
float Distancia = 0; // Distancia medida
float DistanciaAnterior = 0; // Distancia anterior medida (detecção de movimento)
int contador = 0; // contador de tempo para detecçaõ de movimento
// Valores limites das faixas de sinalização
const int LimiteVerde = 29;
const int LimiteAmarelo = 17;
const int LimiteVermelho = 10;
const int LimiteBuzzer = 8;
// Comandos de sinalização
const int Verde = 1;
const int Amarelo = 2;
const int Vermelho = 3;
const int Buzzer = 4;
// Inicialização
void setup() {
pinMode(PinTrigger, OUTPUT); // configura pino Trigger como saída
digitalWrite(PinTrigger, LOW); // pino trigger - nível baixo
pinMode(PinEcho, INPUT); // configura pino ECHO como entrada
pinMode(PinLEDvermelho, OUTPUT); // configura pino LED vermelho como saída
pinMode(PinLEDamarelo, OUTPUT); // configura pino LED amarelo como saída
pinMode(PinLEDverde, OUTPUT); // configura pino LED verde como saída
pinMode(PinBuzzer, OUTPUT); // configura pino Buzzer como saída
Serial.begin(9600); // inicializa monitor serial 9600 Bps (debug)
delay(100); // atraso de 100 milisegundos
Distancia = MedeDistancia();
DistanciaAnterior = Distancia;
desligaSinais();
}
// Loop principal
void loop() {
Distancia = MedeDistancia();
if (estaParado()) { desligaSinais(); }
else if (Distancia <= LimiteBuzzer) { Sinaliza(Buzzer); }
else if (Distancia <= LimiteVermelho) { Sinaliza(Vermelho); }
else if (Distancia <= LimiteAmarelo) { Sinaliza(Amarelo); }
else if (Distancia <= LimiteVerde) {Sinaliza(Verde); }
else { desligaSinais();}
Serial.print("Distancia em centimentros: "); // mostra no monitor serial
Serial.print(Distancia); // mostra o calculo de distancia em metros
Serial.println();
delay(atraso); // tempo de atraso
}
// Envia um pulso de 10 us
void DisparaPulsoUltrassonico() {
digitalWrite(PinTrigger, HIGH); // pulso alto de Trigger
delayMicroseconds(10); // atraso de 10 microsegundos
digitalWrite(PinTrigger, LOW); // pulso baixo de Trigger
}
// Calcula a distância com base no tempo do pulso
float CalculaDistancia(float tempo_us) {
return ((tempo_us * velocidadeSom_mpus) / 2); // calcula distancia em metros
}
// Mede a distância do sensor ultrassônico
float MedeDistancia() {
float TempoEcho = 0; // variável tempo do eco
DisparaPulsoUltrassonico(); // dispara pulso ultrassonico
TempoEcho = pulseIn(PinEcho, HIGH); // mede duração do pulso HIGH de eco em micro seg
return CalculaDistancia(TempoEcho) * 100; // retorna distância em cm
}
// Sinaliza a faixa apropriada
void Sinaliza(int faixa) {
desligaSinais();
if (faixa == Verde) {
digitalWrite(PinLEDverde, HIGH);
} else if (faixa == Amarelo) {
digitalWrite(PinLEDamarelo, HIGH);
} else if (faixa == Vermelho) {
digitalWrite(PinLEDvermelho, HIGH);
} else if (faixa == Buzzer) {
digitalWrite(PinLEDvermelho, HIGH);
tone(PinBuzzer, 500);
}
}
// Desliga a sinalização
void desligaSinais() {
digitalWrite(PinLEDverde, LOW);
digitalWrite(PinLEDamarelo, LOW);
digitalWrite(PinLEDvermelho, LOW);
noTone(PinBuzzer);
}
// verifica se está parado
byte estaParado() {
byte parado;
if (sq(Distancia - DistanciaAnterior) <= tolerancia) {
if (contador >= MaxContador) {
Serial.println("Sem movimento. Desligando sinais...");
parado = 1;
} else {
contador++;
parado = 0;
}
} else {
contador = 0;
parado = 0;
}
DistanciaAnterior = Distancia;
return parado;
}Nosso circuito atende bem ao teste de bancada em protoboard. Mas, e se quisermos realmente montá-lo na garagem? Na referência, temos a página do site instructables do Youtuber detalhando como montar o circuito final para a garagem. Cabe aqui algumas observações para entender as diferenças. A primeira diferença foi a separação do circuito em 2 partes: A primeira contém os LEDS indicadores, conectados por um cabo de 4 vias (GND, 3x LEDs) a primeira parte, com o arduino e Buzzer. O módulo com os LEDS deve ser posicionado em altura visível (nível do para-brisa e retrovisor) e o módulo com o sensor deve ser posicionado na altura do porta-malas.A segunda diferença foi o uso de uma Arduino Nano, mais adequada para soldagem em placa. Esta é alimentado por uma fonte de 5 V com o plug USB apropriado.A Nano tem as mesmas funcionalidades da Uno R3, inclusive uma entrada USB para alimentação e comunicação com o PC. Porém, não tem o segundo conector para fonte externa com plug P4.
Algumas possibilidades de melhoria ou alteração do projeto, a critério do leitor:
Vimos, neste artigo, um circuito simples, mas com uma boa aplicação prática. É um exemplo de como problemas cotidianos podem ser resolvidos de forma descomplicada, facilitando nossa vida e evitando danos. Além disso, aprendemos um pouco mais sobre eletrônica e programação, no processo.
|


